|
|||||||||||||||
Все документы, представленные в каталоге, не являются их официальным изданием и предназначены исключительно для ознакомительных целей. Электронные копии этих документов могут распространяться без всяких ограничений. Вы можете размещать информацию с этого сайта на любом другом сайте.
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ
ТРАНСПОРТНОГО СТРОИТЕЛЬСТВА
МЕТОДИЧЕСКИЕ
УКАЗАНИЯ
ПО ПРИМЕНЕНИЮ НАЗЕМНОЙ
СТЕРЕОФОТОГРАММЕТРИЧЕСКОЙ
СЪЕМКИ НА ИЗЫСКАНИЯХ ДОРОГ
Под редакцией канд. техн. наук С.А. Бутлера
Москва 1972
ПРЕДИСЛОВИЕ
При выполнении топографо-геодезических работ в процессе производства изысканий железных и автомобильных дорог стереофотограмметрические методы используются как средство высокопроизводительного получения объективной информации о местности. В последние годы эти методы находят все более широкое применение для получения численной информации в форме, пригодной для непосредственного использования в проектных расчетах на ЭВМ.
Обработка результатов измерений на ЭВМ с применением методов аналитической фотограмметрии позволяет расширить сферу рационального применения наземной стереофотограмметрической съемки в инженерных изысканиях.
В связи с существенным изменением методики полевых работ и камеральной обработки материалов возникла необходимость переработки «Методических указаний», изданных в 1962 г., применительно к использованию приборов оптико-механического типа и ЭВМ.
Настоящие «Методические указания» разработаны канд. техн. наук Б.К. Малявским, при участии канд. техн. наук Г.П. Кудрявцева, на основе теоретических и экспериментальных исследований, выполненных отделением изысканий и проектирования ЦНИИСа.
Зам. директора института (И. Наседкин)
Руководитель отделения изысканий и проектирования (Г. Верцман)
I. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. Наземную стереофотограмметрическую съемку применяют при изысканиях новых и реконструкции существующих железных и автомобильных дорог, главным образом в горных районах на стадии составления технического проекта и рабочих чертежей.
1.2. При изысканиях трасс и сооружениях на них стереофотосъемку производят на отдельных наиболее сложных участках изучаемой местности, а именно:
а) скальных прижимах и крутокосогорных участках;
б) крутых морских и речных берегах;
в) осыпях и оползневых участках;
г) подходах к тоннелям.
1.3. При использовании в процессе изысканий в горных районах аэрофотосъемки наземную стереофотосъемку применяют для получения крупномасштабных топографических планов на участках, где аэрофотосъемочные материалы не обеспечивают необходимой детализации и степени точности, а также для создания планово-высотного обоснования материалов аэрофотосъемки.
1.4. Материалы наземной стереосъемки используют для составления в камеральных условиях крупномасштабных топографических планов, а также для создания на основе измерений по стереомодели местности горизонтальных и наклонных продольных разрезов, продольных и поперечных профилей по заданным направлениям в процессе проектирования трассы. Положение трассы на особо сложных труднодоступных прижимных участках разрабатывают камерально по материалам наземной стереосъемки.
1.5. При обследовании района изысканий фотогеологическим методом инженерно-геологическое дешифрирование аэроснимков выполняют с использованием соответствующих им наземных фототеодолитных снимков.
1.6. Материалы наземной стереофотосъемки используют для определения в камеральных условиях геодезических координат элементов путевого развития и ситуации железнодорожных станций, составления крупномасштабных топографических планов плоских участков местности и отвесных морских и речных берегов, а также для построения на основе измерений по стереомодели местности продольных и поперечных профилей.
1.7. Пространственные координаты точек местности при наземной стереофотосъемке получают прямой засечкой с базиса фотографирования. Для этого участок местности, подлежащий съемке, фотографируют с двух точек - концов базиса фотографирования (рис. 1).
Рис. 1
Для обеспечения соответствующей точности фиксирования положения точек на снимках фотографируют специальными фотокамерами жесткой конструкции (см. приложения 1 и 2).
Перед фотографированием местности камеры ориентируют в пространстве с помощью специального ориентирного приспособления и уровней, а также определяют величину и направление базиса фотографирования.
В зависимости от задач, вида объекта съемки и последующей методики камеральной обработки стереофотограмметрическую съемку можно выполнять при строго фиксированном или приближенном ориентировании камеры в пространстве.
1.8. Полевые работы при наземной стереофотосъемке заключаются в рекогносцировке участка съемки, выборе положения базисов фотографирования, измерения их длин и азимутов, определения геодезических координат центров фотографирования и контрольных точек на участке съемки. Завершают полевые работы последовательным фотографированием участка со всех намеченных точек съемки.
1.9. Камеральную обработку снимков наземной стереофотосъемки выполняют оптико-механическим или аналитическим путем. В первом случае используют приборы типа стереоавтографа, стереопланиграфа или стереометрографа, с помощью которых составляют топографические планы, профили по заданным направлениям или координаты отдельных точек местности.
При аналитическом способе для измерения снимков используют стереокомпаратор, а вычисления выполняют по специальным программам на ЭВМ.
В результате аналитической обработки снимков могут быть получены координаты отельных точек и цифровые модели местности.
При составлении топографических планов местности более производительным является оптико-механический способ обработки снимков.
Аналитический метод - наиболее универсальный и точный - целесообразно использовать для определения координат отдельных точек, измерения деформаций, а также при определении объемов земляных работ в карьерах.
В ряде случаев рациональным является сочетание аналитического и оптико-механического способов обработки снимков.
Системы координат и элементов ориентирования
Рабочие формулы
1.10. При наземной стереофотограмметрической съемке используются три системы координат:
а) плоская система координат снимка ozx с началом в точке пересечения прямых, соединяющих координатные метки 1-2, 3-4 (рис. 2). В этой системе за ось x принимают линию 3-4, а за ось z - нормаль к ней в точке 0;
Рис. 2
б) пространственная фотограмметрическая система координат Xф, Yф, Zф с началом в левом центре фотографирования (рис. 3, а). За ось Yф принимают проекцию главной оптической оси на горизонтальную плоскость, а за ось Xф - горизонтальную прямую, перпендикулярную направлению оптической оси, а за ось Zф - вертикаль в центре фотографирования.
В некоторых случаях удобно использовать систему фотограмметрических координат, в которой начало координат остается тем же, а осью Xф считается проекция базиса фотографирования на горизонтальную плоскость. Ось Yф в этом случае совмещается с нормалью к направлению базиса, а направление оси Zф - прежнее (рис. 3, б).
Рис. 3
в) система геодезических координат, которая может быть государственной или условной.
1.11. Элементы, определяющие положение центра фотографирования относительно снимка, называются элементами внутреннего ориентирования. Это - главное фокусное расстояние камеры f и координаты главной точки o - x0 и z0 (см. рис. 2). Обычно при изготовлении и юстировке камеры добиваются, чтобы x0 и z0 были близки к нулю. Значение фокусного расстояния камеры f определяют с высокой точностью и приводят в ее паспорте.
1.12. Элементами внешнего ориентирования (ЭВО) являются величины, определяющие положение снимка в момент фотографирования относительно принятой системы координат, геодезической или фотограмметрической. Таких элементов (рис. 4) шесть:
- координат центра фотографирования Xs, Ys, Zs;
- дирекционный угол оптической оси камеры α0;
- угол наклона оптической оси ω;
- угол поворот снимка в своей плоскости x.
Для построения геодезически ориентированной модели местности необходимо знать ЭВО пары снимков, т.е. всего 12 элементов - 6 линейных и 6 угловых.
Рис. 4:
1 - горизонталь; 2 - оптическая ось камеры
1.13. В зависимости от положения снимков относительно базиса и значений ЭВО различают следующие случаи наземной стереофотосъемки; нормальный, равноотклоненный, равнонаклоненный, конвергентный и общий.
При обработке снимков оптико-механическим путем используют нормальный и равноотклоненные случаи съемки, схема которых приведена на рис. 5. В этих случаях ωл = ωп = xл = xп = 0, а углы скоса φл = φп.
Рис. 5
Аналитическую обработку снимков с использованием ЭВМ выполняют на основе зависимостей общего случая съемки, предусматривающей произвольные значения ЭВО снимков.
1.14. При неземной стереофотосъемке в отличие от аэрофотосъемки ЭВО снимков и базис фотографирования обычно устанавливают или определяют в процессе выполнения полевых работ с высокой точностью.
В некоторых случаях, например, при производстве фотографирования с подвижной основы (высокие колеблющиеся опоры, борт судна и т.п.) невозможно установить или определить ЭВО снимков с необходимой точностью. В этих условиях геодезически ориентированная модель может быть построена аналитическим методом с использованием координат опорных точек. Одновременно на этих построений могут быть определены и неизвестные ЭВО снимков.
Съемку при известных ЭВО снимков называют ориентированной стереофотосъемкой, а при неизвестных ЭВО - неориентированной стереофотосъемкой.
1.15. Связь между координатами точек снимка и местности в фотограмметрической системе (см. рис. 3, а) при известных произвольных ЭВО снимков (общий случай ориентированной стереофотосъемки) выражается следующими зависимостями:
где X′i, Y′i, Z′i - пространственные координаты точки левого снимка с началом в левом центре фотографирования;
X″i, Y″i, Z″i - то же для правого снимка, но с началом в правом центре фотографирования;
Bx, By - составляющие базиса фотографирования в принятой системе координат.
Пространственные координаты точек левого и правого снимков находят с использованием известных угловых ЭВО снимков по формулам:
 (2)
(2)
Элементы преобразований a1,2,3; b1,2,3; c1,2,3 (направляющие косинусы) получают по известным углам наклона и поворота снимков:
 (3)
(3)
Координаты точек местности в базисной системе фотограмметрических координат (см. рис. 3, б) находят из выражений:
От формул общего случая съемки легко перейти к нормальному и равноотклоненному случаям, используемым при обработке снимков оптико-механическим способом.
Так, полагая α1 = α2 = ω1 = ω2 = x1 = x2 = 0 для нормального случая съемки и базисной системы координат (By = 0), будем иметь:
 (5)
(5)
В этой же случае, но в первой системе фотограмметрических координат (By ≠ 0) получим:
 (6)
(6)
Для параллельного случая съемки, когда α1 = α2 = α, координаты точек местности в базисной системе координат получают из выражений:
 (7)
(7)
Если принять α1 = α2 = 0, а (By ≠ 0),
 (8)
(8)
где φ - горизонтальный угол между направлением оптической оси и базисом фотографирования (угол скоса).
 (9)
(9)
где Xsлг, Ysлг, Zsлг - геодезические координаты левого центра фотографирования;
α0 - дирекционный угол оптической оси левого снимка;
к + г - поправка на кривизну Земли и рефракцию.
Если фотограмметрические координат получены в базисной системе, то в геодезические их преобразуют по формулам:
где αδ - дирекционный угол базиса фотографирования.
1.17. Если ЭВО снимков известны приближенно, то их находят аналитическим методом путем построения модели, геодезически ориентированной по опорным точкам. При этом используют зависимости общего случая съемки, а построение модели выполняют на основе совместного ориентирования левой и правой связок проектирующих лучей. Наиболее строгой схемой аналитического определения ЭВО снимков и построения модели является схема, основанная на совместном решении линеаризованных уравнений коллинеарности и компланарности соответствующих проектирующих лучей левой и правой связок.
Уравнения коллинеарности для опорных точек, изображенных на снимках, в матричной записи имеют вид:

где
 - разности пространственных координат опорной точки и центра фотографирования в фотограмметрической системе координат.
- разности пространственных координат опорной точки и центра фотографирования в фотограмметрической системе координат.
Уравнение компланарности для точек в этой же системе координат имеет в матричной записи вид:
где BX = Xsп - Xsл; BY = Ysп - Ysл; BZ = Zsп - Zsл.
Уравнения (11) и (12) содержат общие неизвестные - 12 линейных и угловых ЭВО левого и правого снимков.
Каждая опорная точка, изобразившаяся на обоих снимках, позволяет составить по четыре уравнения вида (11) и одно уравнение вида (12).
Таким образом, для определения 12 неизвестных ЭВО необходимо иметь не менее трех общих опорных точек, позволяющих составить 15 уравнений. Уравнения (11) и (12) нелинейны относительно неизвестных, поэтому их решают методом функциональной итерации (метод Ньютона). Для этого необходимо исходные уравнения привести к линейному виду, используя ряд Тейлора и ограничиваясь членами первого порядка.
Уравнения в поправках относительно приближенно заданных значений неизвестных ЭВО имеют вид:
Коэффициенты этих уравнений находят по приближенно заданным значениям ЭВО и измеренным координатам точек снимка в соответствии с зависимостями:
Здесь
![]() ;
; ![]() ;
; ![]() , а элементы преобразований
, а элементы преобразований ![]() ;
; ![]() ;
; ![]() получают по приближенно заданным угловым ЭВО:
получают по приближенно заданным угловым ЭВО:
Во всех выражениях xi, zi - измеренные плоские координаты опорных точек на снимке
 (15)
(15)
Свободные члены уравнений (13) D0X, D0Y, V0q находят по формулам (11) и (12) по приближенно заданным значениям угловых и линейных ЭВО левого и правого снимков.
Общее число уравнений погрешностей вида (13) зависит от числа опорных и ориентирующих точек, схема расположения которых на площади стереопары должна отвечать известным геометрическим условиям.
Рекомендуемые схемы расположения опорных точек при аналитическом ориентировании снимков приведены на рис. 6.
Рис. 6
Систему уравнений погрешности (13) решают по способу наименьших квадратов с оценкой величины поправок в определяемые параметры и точности решения.
Задачу в целом решают методом последовательных приближений и в результате находят поправки в приближенные значения ЭВО снимков стереопары (см. приложение 18).
Координаты точек местности в фотограмметрической системе получают в соответствии с выражениями (1).
От геодезических координат опорных точек в фотограмметрическую систему и обратно переходят на основе приближенно заданного дирекционного угла оптической оси левого снимка в соответствии с выражениями (10).
В связи с большим объемом вычислений аналитическое ориентирование снимков и определение координат точек по изложенной схеме целесообразно выполнять с использованием ЭВМ с объемом оперативной памяти не менее 1024 слов.
Погрешности наземной стереофотосъемки
1.18. Источниками погрешностей при наземной стереофотосъемке являются:
а) неточное значение элементов внутреннего ориентирования съемочной камеры;
б) физические ошибки снимка (дисторсия съемочного объектива, неплоскостность светочувствительного слоя и его деформация при обработке);
в) несоответствие установленных ЭВО камеры заданным;
г) ошибки измерения базиса и координат контрольных точек;
д) ошибки измерения снимков;
е) инструментальные ошибки приборов и метода обработки результатов измерений.
1.19. Влияние ошибок в элементах внутреннего ориентирования камеры на координаты точек снимка выражается зависимостями:
где δf - погрешность принятого значения фокусного расстояния камеры;
x0, z0 - координаты главной точки снимка.
Для того чтобы влияние ошибок элементов внутреннего ориентирования соответствовало точности стереофотограмметрических измерений, эти элементы должны быть известны с предельными ошибками:
при f = 200δf ≤ ±0,03 мм; x0 ≤ ±0,05 мм; z0 ≤ ±0,02 мм;
при f = 100δf ≤ ±0,01 мм; x0 ≤ ±0,02 мм; z0 ≤ ±0,01 мм.
1.20. Физические ошибки снимков при использовании современных фототеодолитных камер и специальных шлифованных фотопластинок могут быть сведены к величинам, лежащим за пределами точности измерения снимков в фотограмметрических приборах.
Однако в реальных условиях при использовании обычных фотопластинок ошибки в положении точек снимка за счет неплоскостности светочувствительного слоя могут быть достаточно велики. Поэтому при повышенных требованиях к точности определения координат точек местности путем наземной стереофотосъемки необходимо проводить специальные исследования плоскостности фотопластинок.
1.21. Ошибки определения координат точек местности при ориентированной стереофотосъемке связаны прежде всего с ошибками устанавливаемых при фотографировании элементов внешнего ориентирования. Эти ошибки носят систематический характер и для нормального случая съемки выражаются следующими формулами:
 (16)
(16)
Для того чтобы ошибки в положении точек снимков из-за неточного углового ориентирования камеры в процессе съемки были бы одного порядка с точностью измерения снимков, необходимо, чтобы ошибки ориентирования не превосходили следующих величин:
δα ≤ ±30″; δΔα(γ) ≤ ±5″; δω ≤ 10″.
Относительные погрешности измерения величины базиса съемки вызывают соответствующие ошибки в координатах точек местности
![]() .
.
Относительные ошибки измерения базиса обычно не превышают 1/3000.
1.22. Ошибки измерения координат точек снимков приводят к случайным ошибкам в положении точек местности, которые можно рассчитывать по приближенным формулам:
Здесь μ - средняя квадратическая ошибка измерения координат и параллаксов;
![]() - знаменатель масштаба изображения
на снимке;
- знаменатель масштаба изображения
на снимке;
![]() ;
; ![]() ;
; ![]() .
.
Выражения (17) удобно использовать для расчета ожидаемых ошибок в положении точек на участке съемки при рекогносцировочных работах на исследуемом объекте с использованием специального рекогносцировочного планшета (приложение 6).
1.28. Точность построения модели и определения координат точек местности при неориентированной стереофотосъемке, когда угловые и линейные ЭВО известны приближенно, связана не только с точностью измерения и идентификации опорных точек, используемых для нахождения неизвестных ЭВО, но и со схемой расположения опорных точек, т.е. с геометрией обратной фотограмметрической засечки.
Для расчета ожидаемых ошибок определения ЭВО и координат точек местности в этом случае целесообразно использовать численный метод, с использованием получаемых при решении уравнений (13) весовых коэффициентов. При этом ошибки в значениях ЭВО получают из выражений вида
![]() ,
,
где μ - ошибка измерения координат;
Qjj - весовой коэффициент, соответствующий определяемому параметру.
II. СОСТАВЛЕНИЕ ПРОЕКТА ВЫПОЛНЕНИЯ НАЗЕМНОЙ СТЕРЕОФОТОСЪЕМКИ
2.1. Для определения возможности и целесообразности наземной стереофотосъемки при решении конкретных задач, связанных с изысканиями трассы и сооружений на ней, необходимо предварительно ознакомиться с районом работ по имеющемуся картографическому и аэрофотосъемочному материалам.
2.2. Основными объектами наземной стереофотосъемки при изысканиях новых железных и автомобильных дорог являются:
а) незалесенные или мелкозалесенные склоны с углами наклона более 20-25°;
б) скальные прижимы и осыпи;
в) обвалоопасные и оползневые участки.
Выделение этих участков производится, как правило, на основе изучения аэрофотосъемочных материалов по трассе.
Если протяжение и площадь участка съемки менее 1 км2, то рабочий проект съемки - размещение базисов и съемочных станций - составляют на основе полевой рекогносцировки участка.
При съемке протяженных косогоров и значительных участков территории в горных районах составляют предварительный проект съемки, а после полевой рекогносцировки - рабочий проект.
2.3. Для составления предварительного проекта съемки используют имеющиеся на изучаемый район картографические материалы масштаба 1:25000 и крупнее, на которых намечают схему размещения съемочных базисов, учитывая охват всего снимаемого участка и минимума работ по привязке станций и контрольных точек.
При наличии на район изысканий аэроснимков масштаба 1:10000 - 1:40000 для составления проекта съемки могут быть использованы маршрутные фотосхемы, составленные из контактных или увеличенных аэроснимков.
2.4. Для обеспечения съемки участка с минимумом «мертвых» зон и наименьшим числом станций базисы следует размещать следующим образом:
- перпендикулярно направлению ската, что позволяет полнее отобразить особенности рельефа снимаемого участка и уменьшить количество «мертвых» зон;
- нормально к направлению оврагов, чтобы обеспечить на снимках изображение тальвега;
- на возвышенных местах, так как количество «мертвых» пространств уменьшается с увеличением относительной высоты стояния фототеодолита.
2.5. При расчете длины базиса и максимальных отстояний необходимо учитывать метод составления плана. Так, в случае оптико-механического способа обработки снимков (стереоавтограф, стереопланиграф) составление плана определенного масштаба может быть выполнено, если значения отстояний Y и базисов B не будут превышать в масштабе плана величин, указанных в табл. 1.
Таблица 1
|
Ymax, мм |
Bmax, мм |
bz, мм |
|
|
Стереоавтограф 1818 |
800 |
120 |
20 |
|
Стереопланиграф |
1500 |
740 |
180 |
|
Стереометрограф |
1500 |
700 |
140 |
2.6. Крайние точки базисов желательно располагать на одинаковых высотах; при невозможности выполнения этого условия допускают превышения концов базиса не более Bzпр ≤ 0,3B.
При использовании графомеханического способа для составления плана при расчете Вzпр следует руководствоваться данными табл. 1.
2.7. Расстояние от съемочной станции до дальней границы снимаемого участка не должно (при fк = 200 мм) превышать для планов масштаба 1:500 - 600-700; 1:1000 - 1000-1200; 1:2000 - 2500; 1:5000 - 4000 - 5000 м.
При этих расстояниях длину базиса рассчитывают из условий обеспечения требуемой точности получения координат на дальнем плане и возможности стереоскопической обработки переднего плана намеченного для съемки участка местности.
Минимальную длину базиса фотографирования при fк = 200 мм, mp = ±0,01 мм и допустимых ошибках в положении точек ±0,4 мм в масштабе плана определяют по формуле
![]() ,
,
где t - знаменатель масштаба составляемого плана.
Расстояние до ближней границы участка съемки, который при выбранном значении базиса может быть обработан стереоскопически
Ymin = 4B.
2.8. Положение съемочных точек и направление базисов должно обеспечивать фотографирование заданного участка съемки без разрывов с перекрытием между соседними секторами съемки по переднему плану не менее 20 %.
Для определения границ съемки используют вычерченные на восковке или целлулоиде палетки, соответствующие нормальному и равноотклоненному случаям съемки с левой и правой точек фотографирования (рис. 7).
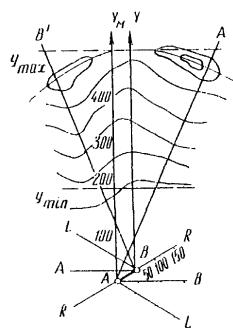
Рис. 7
При этой угол λ равен половина горизонтального угла воля зрения объектива фотокамеры
![]() ,
,
где l - горизонтальный размер кадра (при fк = 200 мм, λ ≈ 22°).
На палетках прочерчивают правую и левую границы съемки, направления нормальных и отклоненных базисов, а также шкалы расстояний в масштабе основы. Совместив палетки таким образом, чтобы направления базисов, соответствующие нормальному или отклоненным случаям, совпадали, а значение базиса было равно выбранному, определяют наилучшее положение базиса и границы съемки.
При съемке протяженных косогоров проектируют в основном съемку при нормальном положении оси и камеры, а направление базиса должно быть примерно параллельно направлению простирания склона. При резком изменении направления простирания склона применяют и равноотклоненные случаи съемки.
2.9. Выбранные положения базисов и границы съемки последовательно наносят на плановую основу, на которой подписывают вид съемки с каждого базиса, длину и номер.
Например,
![]() , что означает базис № 12, длина -
60 м, виды съемки: нормальная, скос влево, скос вправо. Угол скоса (отклонение осей съемки от нормали) обычно выбирается стандартным - 31°,5.
, что означает базис № 12, длина -
60 м, виды съемки: нормальная, скос влево, скос вправо. Угол скоса (отклонение осей съемки от нормали) обычно выбирается стандартным - 31°,5.
2.10. Для определения вертикального захвата местности с выбранных точек съемки строят палетку на миллиметровке в удобном масштабе (рис. 8), на которой по горизонтали откладывают расстояния, а по вертикали - превышения. Из точки 0 проводят границы вертикального захвата местности, соответствующие при предельных перемещениях объектива «Фотео» 19/13138 углу наклона - 29° и углу возвышения +25°. Определив затем превышения относительно точки фотографирования верхней и низшей точек участка съемки, наносят по расстояниям их на палетку. Если они попадают в сектор вертикального захвата, то с выбранной точки местности весь участок может быть сфотографирован.
Рис. 8
- · - · - - объектив вверху;
— - в центре;
- - - - внизу
2.11. Схему геодезической привязки базисных и контрольных точек составляют в зависимости от методики последующей камеральной обработки.
Если обработку намечают производить только оптико-механическим путем, то необходимо из геодезических измерений определить координаты и отметки всех левых базисных точек, азимуты базисов и привязать не менее одной контрольной точки на дальнем плане стереопары.
При съемке протяженных косогоров и труднодоступных скальных прижимов целесообразно взамен сплошной геодезической привязки стереопар и базисов использовать фотограмметрический метод аналитического построения опорной сети.
Протяжение фотограмметрической сети между точками геодезической опоры может составлять в этом случае 7-8 стереопар.
2.12. Схему геодезической привязки проектируют с обеспечением точности определения координат контрольных и базисных точек, регламентируемой инструкциями по топосъемкам в соответствующем масштабе для точек съемочного обоснования или специальными техническими условиями. Геодезическую привязку базисов и контрольных пунктов осуществляют засечками с точек магистрального хода, прокладываемого в районе проектируемой трассы (рис. 9, а).
Если этот участок труднодоступен и магистральный ход прокладывать нецелесообразно или невозможно, то для геодезического обоснования съемки строят аналитическую сеть, опирающуюся на крайние точки магистрального хода на концах участка (рис. 9, б). В этом случае аналитическую ось проектируют таким образом, чтобы по возможности пункты сети совпадали с базисными или контрольными точками. Схему геодезической привязки составляют с расчетом определения координат и отметок одной из точек каждого базиса (предпочтительно левой).
Рис. 9
Привязку контрольных точек осуществляют прямыми засечками с нескольких базисных точек, координаты которых определены точно.
При разреженной геодезической привязке участка съемки определяют координаты контрольных точек на крайних стереопарах и, кроме того, дирекционные углы всех базисов фотографирования.
2.13. В некоторых случаях при повышенных требованиях к точности определения координат точек местности, например, при изучении оползневых явлений конвергентную съемку участка проектируют с увеличенных базисов. Применение конвергентной съемки обеспечивает увеличение углов засечки при определяемых точках, которые в обычных условиях при нормальном случае съемки камерами с f = 200 мм не превышают 16°. При конвергентной съемке за счет увеличения базиса фотографирования угли засечки могут быть увеличены до 40-50°, что при одинаковой точности измерения координат точек снимка приводит к повышению точности определения координат точек местности в 2-2,5 раза.
Проект съемки таких участков с использованием конвергентной съемки составляют на основе полевой рекогносцировки, в процессе которой намечают съемочные точки и направления оси камеры относительно базиса.
2.14. Проект крупномасштабной съемки плоских участков местности (железнодорожных станций, промышленных площадок и других территорий со сложной ситуацией и затрудненными условиями непосредственных измерений) составляют, как правило, после полевой рекогносцировки.
Аппаратура и оборудование для съемки и его подготовка
2.15. Фототеодолитная партия должна иметь следующие инструменты и оборудование:
- фототеодолитный комплект («Photeo 19/1318», «Tal»), фотокамера которого должна быть оборудована затвором с диапазоном экспозиций в пределах 1:25-1:100 сек или универсальную фотокамеру «UMK-10/1318»;
- любительский фотоаппарат типа «Фэд» или «Москва»;
- теодолит с точностью отсчета по горизонтальному и вертикальному кругам не грубее 10″;
- технический нивелир с комплектом реек;
- экспонометр;
- стальную рулетку длиной 20-50 м и тесьмяную рулетку длиной 2 м;
- топографический зонт;
- шанцевый инструмент (лопаты, молоток и т.п.);
- бинокли;
- эккер;
- рекогносцировочную призму или планшет;
- комплект из 20-30 металлических и бумажных марок различной окраски для маркирования опорных и других точек и элементов на участке съемки;
- стандартный комплект полевого фотолабораторного оборудования, включая фотореактивы (приложение 5);
- фототеодолитные пластинки чувствительностью не более 6 ед. Госта (или съемке с неподвижных опор) или высокочувствительные (до 250 ед. пластинки «Изоорто» при съемке с подвижных опор). Необходимое для съемки количество фотопластинок определяют по предварительному проекту съемки;
- полевые журналы, бланки, кальку, бумагу и другие канцелярские принадлежности;
- стереоскоп.
2.16. Фототеодолиты, применяемые при стереофотосъемке, должны обеспечивать постоянство элементов внутреннего и, при фотографировании с твердой опоры, внешнего ориентирования в процессе съемки с ошибками, не превышающими величин, приведенных в табл. 2.
Все оборудование должно быть тщательно осмотрено для выявления и устранения возможных неисправностей и после проведения рабочих поверок и юстировок (см. приложение 1) приведено в рабочее состояние и подготовлено к транспортировке.
Таблица 2
|
Элементы ориентирования |
Допустимые значения ошибок ориентирования фотокамеры с фокусным расстоянием |
|
|
100 мм |
200 мм |
|
|
Фокусное расстояние камеры |
±0,01 мм |
±0,03 мм |
|
Положение главной точки |
±0,02 мм ±0,01 мм |
±0,05 мм ±0,02 мм |
|
Угол скоса |
±20 сек |
±10 сек |
|
Угол конвергенции |
±5 сек |
±5 сек |
|
Угол наклона оптической оси |
±20 сек |
±14 сек |
|
Угол поворота фотопластинки |
±20 сек |
±10 сек |
III. ПОЛЕВЫЕ РАБОТЫ
3.1. Полевые работы, выполняемые фототеодолитной партией, состоящей из двух-трех ИТР и четырех-пяти рабочих, включают следующие процессы:
- рекогносцировку участка и составление рабочего проекта съемки;
- закрепление контрольных и съемочных точек и проведение работ по определению их геодезических координат;
- маркировку контрольных точек и отдельных элементов ситуации;
- фотографирование;
- фотолабораторные работы и анализ полученных негативов;
- топографическое и инженерное дешифрирование снимков.
Рекогносцировка участков съемки
3.2. Задачей рекогносцировки является определение по местности наиболее целесообразного положения фототеодолитных стоянок, контрольных пунктов, опорных точек и схем их геодезической привязки к существующей геодезической сети или к точкам магистрального хода, проложенного в районе проектируемой трассы.
В результате рекогносцировки должен быть составлен рабочий проект размещения и геодезической привязки базисных, контрольных и опорных точек.
3.3. При выборе фототеодолитных станций и определении границ съемки удобно пользоваться фотоаппаратами типов «Фэд» или «Москва», имеющими тот же фотографический захват, что и фототеодолит «Photeo 19/1318» с fк = 200 мм. Рекогносцировку выполняют инженер-фотограмметрист и два рабочих.
3.4. Рекогносцировку косогорного участка местности следует начинать с общего осмотра участка съемки с господствующих высот и проверки правильности составления предварительного проекта размещения фототеодолитных станций. При необходимости положение фототеодолитных станций, намеченное в предварительном проекте, изменяют в соответствии с выявленными на местности условиями.
В результате общего изучения местности уточняют возможность создания разреженного геодезического обоснования съемки, зоны размещения фототеодолитных стоянок с учетом фотосъемки участка без фотограмметрических разрывов и минимального количества «мертвых» пространств.
3.5. После общего изучения местности выполняют детальную рекогносцировку, целью которой является выбор схемы съемки и окончательного положения фототеодолитных стоянок, определения границ секторов съемки с каждого базиса и положение контрольных и дополнительных точек геодезического обоснования. При этом необходимо выполнять следующие условия:
1. Точки стояния фототеодолита должны быть удобны для установки штатива и работы наблюдателя.
2. Горизонтальные и вертикальные секторы охвата не должны закрываться близрасположенными предметами (деревьями, строениями, складами рельефа и т.п.).
3. Угол наклона базиса должен быть по возможности минимальным и не превышать 10° при исследующей обработке снимков на стереоавтографе и 15° при использовании стереокомпаратора.
4. Между базисными точками должна быть прямая видимость со штативов, причем визирный луч должен проходить не ближе 0,5 м от поверхности земли или местных предметов.
5. Привязка левой точки базиса к опорной геодезической сети или к точкам магистрального хода должна обеспечиваться простым и удобным способом.
6. В случае разрыва между периодом съемки и геодезической привязкой пунктов расположение базисных точек должно обеспечивать длительную сохранность закрепленных центров.
Если с базиса невыгодно производить съемку при нормальном положении оптических осей, а также необходимо увеличить площадь съемки, то определяют границы ее при скосах оптической оси влево или вправо. Угол скоса (φ) обычно выбирают стандартным - 31° 30′.
В этом случае для определения направления оптической оси откладывают от направлении базиса угол - 90° + φ (на левой точке) и 90° - φ (на правой точке).
Уточненные на местности положения базисов и секторов съемки наносят на основу, на которой составлялся предварительный проект (карту или фотосхему из аэрофотоснимков), где намечают выбранные в результате полевой рекогносцировки виды съемки и, в зависимости от величины вертикального захвата, положение объектива по вертикали в момент съемки.
Выбор местоположения базисов производят последовательно с расчетом обеспечения перекрытия между границами съемки смежных стереопар порядка 20 %, по ближнему плану снимаемого участка.
3.6. Для уточнения секторов съемки и условий фотографирования объекта в процессе полевой рекогносцировки целесообразно использовать рекогносцировочную призму или рекогносцировочный планшет (приложение 6) с фотографированием участка фотокамерами типа «Фэд» (f = 86 мм) или «Москва» (f = 110 мм).
После проявления экспонированной пленки изготовляют увеличенные до формата фототеодолитного снимка отпечатки (при f = 36 мм примерно в пять раз, а при f = 110 мм в два раза). Полученные снимки позволяют проконтролировать правильность составления рабочего проекта съемки, определить зоны перекрытий со смежных базисов, выявить «мертвые» зоны, наметить хорошо изображающиеся на снимках местные предметы, которые можно использовать в качестве контрольных точек и т.п.
3.7. Одновременно с выбором положения базисных точек намечают контрольные пункты для каждого сектора съемки с базиса и схему геодезической привязки базисных и контрольных пунктов.
В качестве контрольных пунктов удобнее всего использовать хорошо заметные местные предметы, выделяющиеся на фоне участка съемки и отчетливо наблюдаемые с обеих базисных точек (строения, опоры линий электропередач и связи, отдельные деревья, выделяющиеся большие камни, характерные скалы и т.п.). При однообразном характере местности намечают зоны, в которых следует установить и замаркировать контрольные точки.
Геодезическое определение базисных и контрольных пунктов проектируют с расчетом использования главным образом прямых, обратных и комбинированных угловых засечек.
Если базисные и контрольные пункты предполагается определять с магистрального хода, проложенного в районе проектируемой трассы, прямыми засечками, то необходимо обеспечить видимость определяемых точек не менее чем с трех точек хода при углах засечки не менее 80°. На сложных, труднодоступных участках, когда проложение магистрального хода нецелесообразно и затруднительно, геодезическое обоснование производят построением системы треугольников.
При этом вершины треугольников желательно совместить с базисными точками.
3.8. Рекогносцировку и составление рабочего проекта съемки протяженных прижимов и косогоров с разреженным полевым обоснованием производят обычным образом, но при этом более тщательно следят за сохранением перекрытия между смежными моделями. Одновременно с выбором положения базисов намечают схему работ по пространственному ориентированию базисов относительно произвольно принятого начала (например, направление первого базиса, рис. 10). Для определения дирекционных углов базисов в принятой системе координат намечают угловой ход, связывающий все базисы и замыкающийся на опорных пунктах по концам участка съемки.
Рис. 10
3.9. Особенность рекогносцировки и составления рабочего проекта съемки плоских территорий состоит в том, что в этом случае базисные точки должны располагаться на возвышенных относительно плоскости участка местах. В качестве таких точек можно выбирать местные высокие сооружения, например, прожекторные мачты на железнодорожных станциях или высокие здания, вершины окружающих холмов или борта долины. Если вблизи участка, подлежащего съемке, нет таких высоких точек или сооружений, то фотографировать можно с автовышки, на которой устанавливают фотокамеру.
При съемке плоских территорий, как правило, используют общий или равнонаклонный случаи съемки, а базис фотографирования может быть горизонтальным или вертикальным.
На рис. 11, 12, 13 приведены основные схемы фотографирования при съемке плоских участков местности.
Рис. 11
Рис. 12
Рис. 13
3.10. Положение точек и базисов фотографирования при съемке плоских участков территории выбирают с расчетом съемки при минимуме «мертвых» зон и фотограмметрических разрывов. При этом в случае съемки с высоких сооружений используют вертикальный базис фотографирования (рис. 11), а в остальных случаях - горизонтальный при примерно равнонаклоненных осях снимков (рис. 12, 13),
Для определения площади захвата каждой стереопары при рекогносцировке и составлении рабочего проекта съемки обязательно производят фотографирование малоформатными фотоаппаратами и полученные снимки используют для определения зон, в которых должны располагаться опорные точки, необходимые для построения и ориентирования фотограмметрических моделей аналитическим методом.
3.11. При регулярных съемках оползневых участков рекогносцировку и составление проекта размещения базисов производят особенно тщательно, а точки фотографирования закрепляют бетонными столбами с зацементированными марками с таким расчетом, чтобы в каждом цикле фотографирования элементы внешнего ориентирования снимков устанавливались с максимальной точностью.
Положение базисных точек выбирают при этом для решения двух задач: составления планов оползневых участков и определения координат марок, заложенных в тело оползня. В первом случае длина базиса и направление съемочных осей должны обеспечивать возможность обработки снимков оптико-механическим способом, а во втором - аналитическим.
Примерная схема съемки оползневого участка, обеспечивающая решение обеих задач приведена на рис. 14.
Рис. 14
При рекогносцировке положения базисов для съемки оползневых участков следует использовать рекогносцировочный планшет и производить съемки малоформатными фотокамерами для тщательной корректировки положения центров фотографирования и направления съемки перед окончательным закреплением концов базисов бетонными столбами.
3.12. Рекогносцировочные работы при использовании наземной стереофотосъемки для привязки аэрофотоснимков имеют следующие особенности.
1. Рекогносцировку местности и определение положения базисных точек производят с использованием контактных аэрофотоснимков.
2. Секторы съемки должны охватывать только зоны расположения опознаков, необходимых для обоснования аэрофотосъемки, поэтому перекрытия между смежными секторами съемки не требуется.
3. Необходимость в проектировании преимущественного нормального случая съемки отпадает, так как каждая стереопара предназначается для определения в результате измерений лишь нескольких (трех-пяти) точек в зоне расположения опознаков аналитическим методом.
4. Выбранные и закрепленные базисные точки следует опознавать на аэрофотоснимках.
5. Контрольные пункты, координаты которых требуется определить геодезическими работами, специально не намечают. Используют только пункты государственной или опорной сети, попадающие в сектор съемки, а такие намечают точки местности, удобные для контроля правильности съемки по методу контрольных направлений.
В результате рекогносцировочных работ составляют рабочий проект фототеодолитной съемки, состоящий из схемы съемки, геодезического обоснования и краткой пояснительной записки.
На схеме съемки показывают:
- положение и нумерацию базисов фотографирования, виды съемки нормальный, равноотклоненный, наклонный и т.п.);
- границы зон фотографирования с каждого базиса;
- местоположение опорных точек.
В пояснительной записке отражается последовательность съемочных работ и условия съемки с каждого базиса, выявленные в процессе рекогносцировки (характер освещенности, время дня).
Геодезические работы по обоснованию съемки
3.11. Базисные и контрольные точки, а также точки съемочного обоснования закрепляют в процессе рекогносцировки на местности постоянными или временными центрами.
Постоянные центры устанавливают при съемках оползневых участков и подходов к проектируемым тоннелям.
Тип постоянного центра выбирают в зависимости от района работ и необходимого срока сохранности в соответствии с существующими рекомендациями.
Временным центром в обычных условиях может служить деревянный кол длиной 0,5-0,6 м, в верхний срез которого для точного центрирования инструмента вбивается гвоздь.
При твердых и скалистых грунтах в качестве центров следует применять либо заостренные металлические штыри, либо металлические трубки с керном-меткой для центрирования инструмента.
Рядом с центром устанавливают сторожок с обозначением номера точки и других необходимых сведений. Временным центром в условиях работы на железнодорожной станции или промплощадке могут служить костыли, обрезки металлических труб и т.п. Вокруг центра окапывают или выкладывают круг из камней.
3.12. При необходимости контрольные и опорные точки перед съемкой маркируют с помощью фанерных щитов, плотного картона или ткани. В горных скальных районах маркировку контрольных точек осуществляют выкладыванием туров или нанесением марок определенной формы с помощью масляной краски на скале.
Форма марок может быть произвольной (треугольник, квадрат, круг, крест), но для повышения точности геодезических измерений при определении координат точек необходимо отметить геометрический центр марки, а в специальном журнале записать размеры марки.
Минимальные размеры марок зависят от расстояния между маркой и базисной точкой и должны выбираться такими, чтобы изображение марки на снимке имело размеры не менее 0,12×0,004 мм.
Для определения допустимых минимальных размеров марок рекомендуется пользоваться табл. 3, рассчитанной по формуле
![]() ,
,
где L - вертикальный или горизонтальный размер марки в натуре, м;
l - соответствующий размер изображения марки на снимках, мм;
Y - отстояние до марки, м;
fк - фокусное расстояние камеры, мм (200 мм).
Таблица 3
|
Минимальные размеры марок |
Расстояние, м |
||||||
|
50 |
100 |
200 |
400 |
600 |
800 |
1000 |
|
|
Вертикальный |
0,03 |
0,06 |
0,12 |
0,25 |
0,35 |
0,50 |
0,60 |
|
Горизонтальный |
0,01 |
0,02 |
0,04 |
0,08 |
0,15 |
0,20 |
0,20 |
3.13. Если по условиям организации изыскательских работ в период между фотосъемкой и выполнением геодезических работ предполагается разрыв во времени, то закрепление и маркировку точек на местности производят особенно тщательно с расчетом обеспечения их сохранности до начала проведения работ по геодезической привязке.
Следует иметь в виду, что при производстве фототопографической съемки путевого развития станции недопустим разрыв во времени между фотосъемкой и выполнением геодезических работ по определению координат замаркированных точек, так как они находятся в зоне интенсивного движения поездов и поэтому неизменность положения марок не может быть обеспечена.
3.14. Геодезические работы по обоснованию съемки выполняют в соответствии с рабочей схемой, составленной в процессе рекогносцировки участка. Независимо от способа определения погрешности в положении базисных и контрольных точек относительно пунктов рабочего обоснования или магистрального хода не должны превышать:
в плане - ±0,2 мм в масштабе составляемого плана;
по высоте - 1/8 принятого сечения рельефа в равнинном и всхолмленном участках и 1/5 - в горных районах.
3.15. Способы построения рабочего обоснования можно варьировать в зависимости от характера участка.
При необходимости проложения магистрального хода в районе изыскиваемой трассы удобным способом проложения хода с одновременным определением координат базисных и контрольных точек является способ многократных боковых засечек, предложенный проф. А.И. Дурневым.
Схема съемки по способу боковых засечек с точек магистрального хода показана на рис. 15 и 16.
Рис. 15
Рис. 16
Здесь точки 1, 2, 3 ... пункты магистрального хода, В-1, В-2 .... базисные или контрольные точки или дополнительные пункты, необходимые для построения хода. Расположение боковых пунктов может быть двусторонним (рис. 15) и односторонним (рис. 16). Полевые работы заключаются в измерении углов A1, B1; A′1, B′1; A2, B2; А′2, B′2 ... An, Bn; A′n, B′n и базисов B1 и Bn в начале и конце хода.
Для получения значения длины промежуточных сторон необходимо выполнить обычное решение треугольников, причем длины промежуточных сторон так же, как и дирекционные углы сторон хода, вычисляют независимо дважды по углам A, B и A′, B′.
Координаты пунктов магистрального хода и боковых точек вычисляют по известным формулам через длины сторон и дирекционные углы.
При определении геодезических координат опорных точек способом засечек угловые измерения следует выполнять оптическим теодолитом (например, из фототеодолитного комплекта) методом круговых приемов с погрешностью порядка 5-10″. В этом случае относительная погрешность передачи координат точек хода и боковых пунктов обеспечивается 1:5000 - 1:10000. Измерять начальный и конечный базисы следует стальными компарированными рулетками или лентами в четыре приема с точностью измерений порядка 1:2000 - 1:4000 (штриховые ленты).
3.16. Для определения отметок базисных, опорных и контрольных точек при аналитическом методе создания высотного обоснования (например, способом многократных боковых засечек) следует применять тригонометрическое нивелирование с измерением углов наклона оптическим теодолитом с ценой деления вертикального круга порядка 5″. Измерения при этом следует выполнять при двух положениях трубы (КП и КЛ). Колебания значения места нуля вертикального круга при измерениях с одной станции не должны превышать ±10″.
Фотографирование местности
3.17. Перед производством фотосъемочных работ в 1-2 раза в течение полевого сезона выполняют рабочие поверки фотокамеры и остальных приборов фототеодолитного комплекта (приложение 1), а также опытное фотографирование для определения оптимальных величин экспозиции в различных условиях освещенности в различное время дня. Опытное фотографирование производят при нескольких значениях величины выдержки. Для определения приближенного значения выдержки следует использовать фотоэкспонометр типа «Ленинград» или таблицы выдержек.
3.18. Перед выполнением фотосъемочных работ составляют план работы на стоянке с таким расчетом, чтобы фотографирование с каждой стоянки производилось в такое время дня, когда сектор съемки освещен наиболее благоприятно. При этом необходимо учитывать следующие обстоятельства.
1. Для получения однообразного по контрастности изображения местности на снимках при съемке с левой и правой точек базиса фотографирования разрыв по времени должен быть как можно меньше.
2. Наиболее благоприятным временем дня при съемке является такое, когда тени минимальны и весь участок съемки равномерно освещен солнцем.
3. Необходимо внимательно следить за подвижным составом при съемках станционной территории, так как дым паровоза или выхлопные газы тепловоза, а также и сам подвижной состав могут закрыть фотографируемые элементы станционной ситуации.
3.19. При производстве фототеодолитной съемки в горных, оползневых районах местности на каждой фототеодолитной стоянке выполняют следующие работы:
- установку инструментов на базисных точках;
- фотографирование местности;
- измерение длины базиса фотографирования, угла наклона и угловую привязку направления базиса;
- измерение горизонтальных и вертикальных углов на контрольные точки и другие пункты в соответствии с рабочим проектом или привязку опорных точек для построения разреженного планово-высотного обоснования съемки.
Ниже дается описание работы на фототеодолитной стоянке с наиболее распространенным фототеодолитным комплектом «Photeo 19/1318» по существующей методике, позволяющей, кроме топографических съемок косогорных районов, в условиях железнодорожных станций или промышленных площадок фотографировать с жесткой опоры разные инженерные сооружения (путепроводы, переезды, отдельные здания и т.п.).
Аналогично выполняют съемку с фототеодолитами VMK 10/1318, Tal, Геодезия. При работе с другими типами камер (Вильд, Цейсс С-3б и др.) возможны несущественные изменения в отдельных операциях.
Последовательность работ при производстве фотографирования следующая:
1. Прочно устанавливают штативы с укрепленными на них трегерами над левой и правой базисными точками. Центрирование инструментов тщательно выполняют с помощью отвесов.
2. В левой базисной точке устанавливают на трегере фотокамеру и приближенно горизонтируют ее по уровням, а в правой - визирную марку, ориентировав ее в направлении базисов. Над фотокамерой укрепляют топографический зонт, закрывающий корпус камеры от прямых солнечных лучей.
3. Измеряют высоту инструмента (i) над левой и правой точками при помощи тесьмяной рулетки. Причем непосредственно измеряют высоту от центра до верхнего обреза трегера - i0 и для получения высоты инструмента к этому значению прибавляют постоянную величину (hi), являющуюся расстоянием от верха трегера по оптической оси объектива фотокамеры в нулевом положении. Для фотокамеры «Photeo 19/1318» эта величина hi = 11 см. Следовательно, i = i0 + hi, что и записывается в журнал фотографирования (приложение 7).
4. Устанавливают зрительную трубу ориентирного устройства на заданный угол относительно базиса, руководствуясь при этом метками случая съемки на корпусе камеры (A, AL, AR), и ориентируют фотокамеру в направлении съемки, вводя в биссектор ориентирного устройства марку, установленную на правой точке базиса.
5. Устанавливают объектив камеры по вертикали в положение, определенное при производстве рекогносцировки, и, открыв крышку матового стекла, проверяют правильность положения объектива и вертикальный захват местности. При необходимости перемещают объектив по вертикали, добиваясь нужного захвата по высоте.
6. Закрывают объектив крышкой, отводят прижимную рамку от прикладной и снимают рамку с матовым стеклом.
7. Вставляют кассету с пластинкой, вытаскивают шторку кассеты и подают рамку с кассетой вперед до плотного прилегания пластинки к прикладной рамке.
8. На барабанчиках нумератора и регистратора вида съемки устанавливают номер стоянки (снимка) и случай съемки (A, AL, AR или B, BL, BR), эти данные заносят в журнал фотографирования.
9. Тщательно горизонтируют камеру по уровням, помещенным по контрольной площадке, и точно ориентируют зрительную трубу наводящим винтом камеры на базисную марку. При этом необходимо предварительно проверить правильность установки отсчета на ориентирном устройстве. Если после поворота камеры уровни отклонились более чем на половину деления, их вновь устанавливают на середину и проверяют ориентировку.
10. Осторожно снимают крышку объектива, производят экспонирование пластинки, после чего вновь надевают крышку.
11. Отводят прижимную рамку, закрывают кассету шторкой и вынимают кассету из рамки прижимного устройства.
В такой последовательности выполняют съемку при другом положении оптической оси камеры относительно направления базиса или при другом положении объектива по высоте.
Закончив фотосъемку с левой точки, фотокамеру снимают с трегера и переносят на правую точку, где ее устанавливают взамен визирной марки, не снимая трегера, и аналогично производят фотосъемку.
В журнале фотографирования отмечают дату съемки, номер кадра, положение объектива, положение оптической оси относительно базиса, номер кассеты, погоду и выдержку.
Если в процессе съемки произошли случайные нарушения положения камеры, то съемку повторяют.
3.20. После фотографирования с обоих концов базиса (или до фотографирования, если это вызвано резким изменением условий освещенности) производят измерение базиса фотографирования.
Для этого вместо фотокамеры на штатив, не снимая трегера, устанавливают теодолит из комплекта, а на место визирной марки предварительно собранную базисную рейку, которую с помощью коллиматора ставят перпендикулярно направлению базиса.
При помощи теодолита методов повторений измеряют параллактический угол ε (рис. 17, а), позволяющий вычислить длину базиса по формуле
![]() .
.
Для обеспечения относительной погрешности определения базиса не грубее 1/2000 необходимо выполнить шесть полных повторений.
Рис. 17
Результаты измерений записывают в журнал и по величине полученного угла вычисляют длину базиса. Ее можно также определить по таблице расстояний, прилагаемой к фототеодолитному комплекту.
Если длина базиса превышает 130-150 м, то для повышения точности определений базисную рейку на дополнительном штативе следует установить примерно посередине (рис. 17, б) и измерить два параллактических угла на левой и правой базисных точках (ε1 и ε2). Величину базиса вычисляют в этом случае по формуле
![]() .
.
При длине базиса до 50 м его измеряют непосредственно компарированной стальной рулеткой.
3.21. После определения длины базиса измеряют горизонтальные и вертикальные углы на контрольные и геодезические точки. Наблюдения выполняют одним полным приемом, в который включаются: вторая базисная точка, 1-2 геодезических пункта (или точки магистрального хода), которых определялись координаты этой базисной точки, а также 2-3 контрольных пункта для проверки правильности ориентирования фотокамеры по способу контрольных направлений.
3.22. При производстве стереофотосъемки плоских участков местности с высоких опор на каждой станции выполняют следующие работы:
1. Устанавливают камеру на концах базиса фотографирования с заданными углами наклона на штативе или закрепляют ее к элементам опоры с помощью специальной струбцины (приложение 20).
2. Ориентируют оси камеры в пространстве в соответствии с направлениями, определенными при рекогносцировке участка, используя при этом ориентирное устройство, уровни и угловые шкалы на струбцине.
3. Фотографируют в последовательности, изложенной выше. Если при этом опора, на которой установлена или закреплена камера, не устойчива и колеблется от воздействия ветра и перемещения на ней наблюдателя, то камера должна быть оборудована затвором, а съемка производиться на высокочувствительных пластинках.
4. Определяют и записывают в журнал приближенные значения элементов линейного и углового ориентирования снимков (приложение 7).
3.23. Если по каким-либо причинам (освещение, метеорологические условия, наличие подвижного состава на участке съемки и т.п.) к моменту прихода на место съемки фотографирование производить нецелесообразно, то следует сменить сектор фотографирования или выполнить измерительные операции по привязке опорных точек.
При наличии в фототеодолите индикатора прижимов ЦНИИСа (приложение 4) плотность прилегания кассеты с фотопластинкой к координатным меткам камеры фиксируется зажиганием четырех ламп, расположенных соответственно меткам.
Полевые фотолабораторные работы и анализ негативов
3.24. Для выявления таких недостатков фотосъемки как неприжимы фотостекла к прикладной рамке камеры, плохое фотокачество, неудовлетворительная компоновка деталей изображения производят фотолабораторную обработку экспонированных пластинок, как правило, в день съемки.
Для проявления фотопластинок можно употреблять различные по составу проявляющие растворы, рецептура которых и описание процесса фотолабораторных работ приводится в приложении 5.
3.25. Для полевого инженерного дешифрирования фототеодолитных снимков с негативов изготавливают на матовой бумаге контактные отпечатки.
3.26. Непосредственно после фотообработки производят анализ и оценку фотографического и фотограмметрического качества негативов.
Нормально экспонированный и правильно обработанный негатив должен иметь нормальную плотность и прозрачность, быть достаточно контрастным с проработкой мелких деталей, не иметь вуалей и механических повреждений эмульсии (царапины, оползание эмульсии и т.п.), пятен, полос и сдвигов изображений.
Результаты фотографического анализа записывают в регистрационный журнал (приложение 8), в котором отмечают их фотокачество и пригодность для дальнейшей обработки.
Основная цель полевой фотограмметрической оценки - выявить негативы, полученные при неплотном прилегании плоскости фотопластинки к прикладной рамке фотокамеры (неприжим). Для этой цели удобно использовать эталоны, полученные при плотном прилегании пластинки.
Для определения величины неприжима в полевых условиях исследуемую и эталонную пластинки укладывают эмульсией друг к другу, совмещает координатные метки обоих негативов по оси X-X и оценивают величину несовпадения при помощи измерительной лупы с точностью 0,05 мм.
Если расстояние между координатными метками отличаются от эталонного более чем на 0,1 мм для аналитической камеральной обработки и на 0,03 - при графо-механической, то съемку следует повторить и проверить состояние кассеты, в которой была экспонирована исследуемая пластинка.
Если фототеодолит оснащен индикатором прижимов, принцип действия и чертежи которого даны в приложении 4, то полевой фотограмметрической оценки негативов не производят.
Результаты полевого анализа вносят в журнал оценки качества негативов (приложение 9).
Топографическое и инженерное дешифрирование снимков
3.27. Дешифрирование выполняют на контактных или увеличенных снимках. Оно заключается в опознавании и закреплении на снимках пунктов планово-высотной подготовки и элементов ситуации, подлежащих изображению на составляемых по материалам фототеодолитной съемки топографических планов.
Часть элементов и объектов, изобразившихся на снимках, содержание которых не вызывает сомнения, дешифрируют камерально на основе стереоскопического просмотра снимков. Объекты, элементы ситуации и рельефа, а также сооружения, качественное содержание которых при камеральном просмотре установить не удается, опознают на местности в результате полевого дешифрирования снимков. Полевое дешифрирование снимков выполняют как путем обхода контуров и объектов, содержание которых необходимо установить, так и визуально с точек фотографирования.
В результате полевого дешифрирования на контактных или увеличенных отпечатках показывают:
- границы сельскохозяйственных угодий, садов, огородов, лесопосадок, леса, кустарника и т.п., с указанием содержания контуров (порода леса, средняя высота и толщина деревьев);
- элементы гидрографии (реки, ручьи, канавы, колодцы и родники и т.п.), болота и заболоченные участки;
- дороги с классификацией по категории и типу;
- линии связи и электропередач с указанием количества проводов;
- ограждения с указанием их типа (деревянные заборы и изгороди, каменные ограждения, живые изгороди и т.п.);
- мосты и переправы с указанием их технических характеристик;
- отдельные здания с указанием типа постройки и характера их использования.
В соответствии с дополнительными требованиями при полевом дешифрировании снимков могут наносить элементы геологического строения участка, горизонты высоких паводковых вод (при съемке мостовых переходов) и другие данные, устанавливаемые техническим заданием на съемку.
3.28. При опознавании объекта в процессе полевого дешифрирования его контуры показывают тушью на снимке: зеленой - для элементов гидрографии и черной - для остальных объектов, а содержание поясняют условным знаком или подписью.
Элементы ситуации и сооружения, изображение которых на снимке занимает площадь менее 1 мм2, накалывают на снимках и с обратной стороны нумеруют. Содержание этих элементов поясняется в специальной ведомости дешифрирования (приложение 10).
Если отдельные элементы, положение которых необходимо показать на топографическом плане, не изобразились на снимках, то в районе их расположения опознают на снимке не менее трех четких точек, к которым привязывают неизобразившийся элемент ситуации, положение которого на плане получают линейной засечкой.
3.29. При производстве стереофотосъемки железнодорожных станций и промышленных площадок в результате инженерного дешифрирования опознают и регистрируют:
- опорные точки с тщательно выполненным на обороте снимка абрисом;
- математические центры крестовин с указанием номера и марки;
- остряки, начала и концы рамных рельсов, предельные столбики и т.д.;
- точки на концах полевых поперечников;
- углы зданий и емкостей, постройки с указанием типа и характера их использования;
- опоры линий коммуникационных сетей, линии электропередач со всеми необходимыми сведениями;
- колодцы подземных коммуникаций;
- ограждения с указанием их типа и т.д.
Для описания опознанных объектов на каждый снимок составляют ведомость дешифрирования (приложение 9), в которой под номерами, соответствующими порядковым номерам объектов на снимке, дают их качественную характеристику. Отдешифрированные элементы ситуации и их номера закрепляют на снимке тушью.
Полевая документация
3.30. В результате выполнения полевых работ должны быть получены следующие материалы:
- исполнительная схема выполненной фототопографической съемки;
- схема геодезического обоснования съемки;
- полевые журналы геодезической подготовки;
- ведомости вычислений геодезических координат и отметок пунктов съемочного обоснования и опорных точек;
- журналы фототеодолитной съемки;
- ведомости дешифрирования съемки;
- ведомости анализа негативов;
- негативы фототеодолитной съемки и контактные снимки с результатами дешифрирования.
3.31. Схему выполненной фототопографической съемки составляют в результате уточнения рабочего проекта съемки. Базисные и опорные точки наносят по результатам геодезических измерений. Границы секторов съемки, в соответствии с видами выполненной с каждого базиса съемки фотографирования, наносят на основу с помощью транспортира.
На схеме геодезического обоснования для определения правильности и точности проведенных геодезических работ показывают значения плановых и высотных невязок.
3.32. Пары негативов подбирают в соответствии с видами съемок и укладывают в коробки, на которых указывают перечень содержащихся в ней материалов, номера базисов и снимков.
IV. КАМЕРАЛЬНАЯ ОБРАБОТКА МАТЕРИАЛОВ НАЗЕМНОЙ СТЕРЕОФОТОСЪЕМКИ
4.1. В зависимости от задач, методики съемки и геодезической подготовки, а также наличия стереофотограмметрической аппаратуры обработку снимков выполняют оптико-механическим, аналитическим или графо-аналитическим способами.
Оптико-механическим путем обрабатывают снимки, полученные при нормальном и равноотклоненном случаях съемки, составлении топографических или фронтальных планов и профилей крутокосогорных и прижимных участков изыскиваемых трасс.
Материалы ориентированной стереофотосъемки при произвольных, но известных значениях базисов и ЭВО снимков, а также неориентированной, но обеспеченной пунктами геодезической подготовки съемки обрабатывают аналитическим и графо-аналитическим методами. При этом вычисления выполняют по специальным программам на ЭВМ.
4.2. Предварительно, на основе исполнительной схемы выполненной съемки, намечает последовательность обработки снимков по участкам. В соответствии с этой последовательностью подбирают снимки по стереопарам и подготавливают рабочую основу для составления планов или специальных измерений по стереомодели местности.
Кроме координат и отметок точек геодезической основы съемки, по результатам полевых измерений вычисляют дирекционные углы всех базисов и координаты левых центров фотографирования и составляют соответствующую ведомость. Для обработки неориентированных снимков находят приближенные значения ЭВМ в принятой для обработки системе координат.
Составление топографических планов оптико-механическим способом
4.3. Обработка снимков на стереоавтографе при составлении топографических планов включает следующие процессы:
- подготовительные работы;
- сгущение сети контрольных точек;
- установку снимков в приборе и ориентирование планшета;
- ориентирование стереомодели по контрольным точкам;
- рисовку ситуации и рельефа.
4.4. Подготовительные работы состоят из следующих процессов проверки исправности стереоавтографа:
- выполнения его рабочих поверок;
- подготовки рабочей основы для ориентирования стереомодели;
- проверки постоянства элементов внутреннего ориентирования снимков;
- составления плана.
Исправность стереоавтографа проверяют после значительного перерыва в работе прибора; при этом следует тщательно очистить все направляющие и оптическую систему от пыли и смазать трущиеся части прибора тонким слоем специального масла. Одновременно проверяют исправность системы освещения и сигнализации, состояние оптики, плавкость движений и отсутствие «люфтов». Затем выполняют рабочие поверки стереоавтографа, порядок и способы проведения которых даются в приложении 15.
4.5. Подготовка рабочей основы заключается в нанесении на съемочный планшет по координатам контрольных и базисных точек, точек рабочего обоснования (магистральных ходов или аналитической сети) и точки, фиксирующей направление оптической оси снимка или одно из контрольных направлений (рис. 18). Для фиксирования на планшете направления оптической оси или контрольного направления вычисляют координаты точек на этом направлении в ближнем и дальнем планах сектора съемки:
где Xsл, Ysл - координаты левой базисной точки;
S - расстояние от базиса до границы съемки, округленное до 50-100 м;
σ0 - дирекционный угол направления оптической оси (или контрольного направления).
Разбивка сетки координат и нанесение точек на планшет производится координатографом.
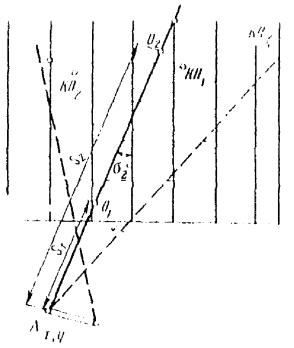
Рис. 18
4.6. Для установки снимков в приборе из кассет извлекают снимкодержатели и устанавливают их на световой пульт. На стекло снимкодержателя эмульсией вниз укладывают негатив и центрировочным прибором перемещают его в положение, когда штрихи на стекле снимкодержателя совпадают с центрами координатных меток негатива (рис. 19).
Рис. 19
После центрирования негативов в снимкодержателе их устанавливают в кассеты прибора. На отсчетных барабанчиках стереоавтографа устанавливают величины элементов внутреннего и внешнего ориентирования - значение фокусных расстояний, величину конвергенции γ, базисные составляющие BX, BY, BZ, а также величину смещения объектива камеры по вертикали в момент съемки с каждой точки. Величину базисных составляющих рассчитывают в зависимости от углов скоса и превышения концов базиса фотографирования по формулам:
![]() ;
;
![]() ;
;
![]() ,
,
где B - горизонтальное положение базиса;
φ - угол скоса;
Δh - превышение правого центра проекции над левым;
tм - знаменатель масштаба модели, построенной на стереоавтографе.
Значение масштаба модели выбирают в зависимости от отстояний до снимаемого участка и заданного масштаба плана по табл. 4.
Таблица 4
|
Предельные отстояния |
Масштабы модели |
Увеличение на координатографе |
|
|
1:500 |
200 |
1:500 |
1,0 |
|
400 |
1:1000 |
2,0 |
|
|
1:1000 |
400 |
1:1000 |
1,0 |
|
800 |
1:2000 |
2,0 |
|
|
1:2000 |
400 |
1:1000 |
0,5 |
|
800 |
1:2000 |
1,0 |
|
|
1600 |
1:4000 |
2,0 |
|
|
1:5000 |
1000 |
1:2500 |
0,5 |
|
2000 |
1:5000 |
1,0 |
|
|
4000 |
1:10000 |
2,0 |
Если превышение концов базиса в поле не измерялось, то величину BZ устанавливают устранением поперечного параллакса при стереоскопическом наблюдении модели движением винта BZ; составляющие BX, BY перед этим должны быть установлены.
После установки на стереоавтографе элементов внутреннего и внешнего ориентирования установочные устройства закрепляют зажимными винтами.
4.7.
Когда модель в приборе построена, необходимо ориентировать относительно нее планшет с рабочей основой. Для этого используют
точки, фиксирующие направление оптической оси левого снимка. При отключенном координатографе марку микроскопа координатографа
совмещают с осевой точкой, расположенной в ближнем
плане. Затем движением по оси Y перемещают марку на точку оси, расположенную в дальнем плане, поворачивая планшет до тех пор,
пока направление движения чертежного устройства по оси Y не совпадет с направлением оптической оси левого снимка на планшете. Методом
последовательного приближения, переходя от одной
точки к другой, добиваются положения, при котором направление движения чертежного устройства совпадает с направлением оптической оси левого снимка. После этого планшет закрепляют, а на счетчиках прибора устанавливают отсчеты: штурвалом
на оси X - отсчет 500,00, °, штурвалом
на оси Y - отсчет, равный
расстоянию до одной из точек на оси снимка в масштабе модели ![]() . Совместив марку
координатографа с этой точкой на планшете, присоединяют координатограф к прибору при выбранном коэффициенте увеличения (0,5; 1,0; 2,0). Если при этом
марка координатографа не устанавливается на точку, фиксирующую положение оси съемки на планшете, то ее подправляют установочными
винтами.
. Совместив марку
координатографа с этой точкой на планшете, присоединяют координатограф к прибору при выбранном коэффициенте увеличения (0,5; 1,0; 2,0). Если при этом
марка координатографа не устанавливается на точку, фиксирующую положение оси съемки на планшете, то ее подправляют установочными
винтами.
4.8. Для ориентирования модели относительно геодезической основы планшета достаточно иметь три контрольные точки на дальнем плане обрабатываемого участка (рис. 20).
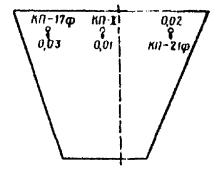
Рис. 20
Ориентирование модели по контрольным точкам выполняют в следующем порядке.
1. Наводят стереоскопически марку на контрольную точку 1 и при помощи установочного микроскопа определяют величину несовпадения марки микроскопа с точкой 1 на планшете. Если расхождение в положении точек по оси X превышает 0,2 мм на планшете, то движением штурвала на оси Y перемещают марку микроскопа до совпадения с точкой 1 на планшете. Если при этом смещение марки относительно наблюдаемой контрольной точки на модели будет меньше +1 мм, то совмещение марки с изображением контрольной точки достигается путем перемещения правого негатива по оси X прибора.
При больших отклонениях марку наводят на изображение точки изменением угла конвергенции.
Совмещение марки на модели и планшете с наблюдаемой контрольной точкой осуществляют до тех пор, пока ошибки несовмещения будут менее 0,2 мм.
2. Наведя марку на изображение точки 2, проверяют совмещение марки микроскопа с положением этой точки на планшете. Аналогично изложенному, наводят марку микроскопа на точку на планшете, а возникшую погрешность, большую 0,2 мм, ликвидируют движением BY плановой линийки.
3. При удовлетворительном качестве негативов точка 2 является контрольной - при наведении марки на ее изображение на модели, величина смещения на планшете не должна превышать 0,4 мм и распределяется установочным микроскопом одинаково на все точки.
При больших отклонениях проверяют правильность вычисления координат и нанесения контрольных точек, а затем повторяют ориентирование.
4. Если после ориентирования модели по оси Y (1-3 пункты) возникли погрешности в положении точек по оси X, превышающие 0,2 мм, то планшет поворачивают на величину среднего арифметического из отклонений на всех трех точках, после этого величина отклонения на каждой из контрольных точек не должна превышать 0,2 мм, а точка на оси в ближнем плане (вокруг которой поворачивается планшет) не должна получить смещение более 0,1 мм.
5. Выполняют контрольные наблюдения на все точки основы, имеющие координаты; расхождения в положении точек в плане не должны превышать 0,4 мм.
6. Для ориентирования модели по высоте барабан счетчика высот устанавливают по масштабу модели, указатель положения левого объектива ставят на нуль, а измерительную марку совмещают с одной из меток по оси X-X. В таком положении на счетчике высот фиксируют отметку горизонта инструмента в момент съемки. Затем указатель положения объектива вновь переводят на соответствующий отсчет. Наведя стереоскопически марку на контрольную точку 1, движением ножного штурвала устанавливают ее отметку. Марка должна совпадать с моделью в точке 1. Аналогично проверяют правильность фотограмметрических высот в точках 2 и 3. Если марка отклоняется от контрольных точек на величину, не превышающую 1/4-1/5 от принятого сечения рельефа горизонталями, то модель по высоте ориентирована удовлетворительно.
При больших расхождениях в точке 1 после того, как ножным диском установлена ее геодезическая отметка, марку наводят на модель перемещением левого объектива, а возникающий поперечный параллакс устраняют перемещением правого объектива. Полученные при наблюдении точек 2 и 3 разности высот распределяют равномерно изменением установки счетчика высот. При значительных расхождениях в отметках контрольных точек проверяют вычисления отметок горизонта инструмента и контрольных точек.
Величины отклонений при наблюдении всех контрольных точек в плане и по высоте записывают в журнале обработки снимков на стереоавтографе (приложение 16).
4.9. После ориентирования модели в стереоавтографе по контрольным точкам производят рисовку ситуации и рельефа.
Составление плана начинают с перенесения ситуации на планшет. Для этого предварительно просматривают границы контура на стереомодели, используя данные полевого дешифрирования. Затем, совместив марку на модели с одной из точек контура, ножной педалью опускают острие карандаши на планшет. Одновременным движением штурвалов по оси X, Y и ножным диском Z перемещают марку по границе контура так, чтобы она все время касалась поверхности модели.
Таким образом, на планшете получают изображение контура местности, содержание его поясняют надписью или условным знаком. Контуры искусственных сооружений правильной геометрической формы (здания, заборы, линии связи и т.п.) получают набором точек на углах поворота, которые затем соединяют прямыми линиями.
Малые по площади элементы ситуации наносят в соответствии с наколами на полевых отпечатках и ведомостями дешифрирования.
4.10. Рисовку рельефа выполняют после составления контурной части плана, начиная с элементов, не изображающихся горизонталями (бровки скальных обрывов, отдельные скалы и большие камни, промоины). Эти элементы зарисовывают аналогично элементам ситуации, но обязательно с набором пикетных высотных точек. Затем модель местности просматривают, чтобы определить формы и характер рельефа и лучшее изображение его горизонталями. Одновременно производят набор пикетов на характерных точках и линиях рельефа. При этом измерительную марку наводят на характерную точку модели, положение ее на планшете фиксируют включением ножной педали, а высотную отметку снимают со счетчика высот. Для повышения точности получения отметок характерных точек наведение на каждую точку выполняют дважды и на планшет выписывают среднее значение полученной отметки.
Таким образом, набирают ряд пикетных точек на вершинах и понижениях, по тальвегам логов и вдоль линии водоразделов.
Горизонтали, в зависимости от характера растительного покрова на снимаемом участке, изображают либо непрерывным проведением марки по модели, либо по пикетам.
В первом случае, на открытых склонах, на счетчике высот устанавливают отметку горизонтали, марку стереоскопически наводят на модель вблизи одной из границ рабочей площади пары, карандаш ножной педалью опускают на планшет и движениями штурвалов по оси X и Y перемещают марку по модели так, чтобы она все время касалась поверхности. После проведения первой горизонтали на счетчике высот устанавливают отметку следующей горизонтали и аналогичным образом вычерчивают ее на планшете.
На участках с однообразной крутизной снимков можно непосредственно получать вторые или пятые горизонтали, а промежуточные проводить интерполированием.
Если участок местности покрыт сплошным кустарником и поверхность земли не просматривается, горизонтали рисуют методом трассирования, устанавливая на счетчике высот отметку, равную отметке проводимом горизонтали, увеличенной на среднюю высоту кустарника. Среднюю высоту кустарника дает разность показаний счетчика высот при наведении марки на верх кустарника и поверхность земли в нескольких точках на границе кустарника.
4.11. После рисовки ситуации и рельефа составленный план проверяют набором контрольных пикетов равномерно по площади стереопары на точках, характерных по рельефу. Расхождения в отметках пикетов и отметках, полученных интерполяцией между горизонталями, не должны превышать 1/3 принятого сечения рельефа, а на крутых склонах разность отметок между точками перегиба должна соответствовать числу проведенных горизонталей.
Расхождения в положении контурных точек не должны превышать 0,5 мм в масштабе плана.
При обработке стереопар, смежных с уже обработанными участками, правильность рисовки ситуации и рельефа проверяют по сводкам со смежными стереопарами до начала составления плана на обрабатываемой стереопаре.
Расхождения по сводкам между соседними стереопарами не должны превышать удвоенных величин допускаемых расхождений для контрольных пикетных точек, т.е. по высоте не более 2/3 сечений рельефа и 1 мм в плане. Горизонтали сводятся осреднением расхождений на стыках.
4.12. Участок плана, проконтролированный набором контрольных пикетов и сведенный на границах смежных стереопар, вычерчивают карандашом. При этом контурную часть плана обозначают условными знаками, а горизонтали - в соответствии с правилами топографического черчения.
4.13. Из других приборов графо-механического метода при обработке снимков наземной стереофотосъемки можно использовать стереопланиграф и стереометрограф.
4.14. Масштабы модели при обработке снимков на стереопланиграфе могут колебаться в больших пределах, чем на стереоавтографе; значения масштабов и предельные отстояния приведены в табл. 5.
Таблица 5
|
Предельные отстояния |
Масштаб модели |
Коэффициент увеличения координатографа |
|
|
1:300 |
300 |
1:500 |
1 |
|
450 |
1:750 |
1,5 |
|
|
600 |
1:1000 |
2,0 |
|
|
900 |
1:1500 |
3,0 |
|
|
1:1000 |
600 |
1:1000 |
1 |
|
1200 |
1:2000 |
2,0 |
|
|
1800 |
1:3000 |
3,0 |
|
|
1:2000 |
1200 |
1:2000 |
1,0 |
|
2400 |
1:4000 |
2,0 |
|
|
3600 |
1:5000 |
3,0 |
|
|
1:5000 |
3000 |
1:5000 |
1,0 |
|
9000 |
1:15000 |
3,0 |
Пределы обработки отстояний по ближнему плану равны 1/4 от предельных отстояний, указанных в табл. 5.
Ориентирование фототеодолитных снимков в стереопланиграфе требует тщательной юстировки прибора и точного определения нуль-пунктов всех шкал. Перед ориентированием и обработкой снимков оси стереопланиграфа переключают таким образом, чтобы счетчик, фиксирующий высоты при обработке аэроснимков, показывал значения отстояний (Y), а одну из осей координатографа необходимо подключить к этой оси, другая же остается подключенной к оси X.
Негативы точно ориентируют по штрихам на стеклах снимкодержателей, которые смещаются в кассетах в направлении оси Z на величину, равную, но противоположную по знаку вертикальному смещению объектива в момент съемки. Фокусные расстояния проектирующих камер устанавливают на отсчеты, равные фокусным расстояниям фототеодолитных снимков.
На шкалах углов наклона, скоса и поворота обеих камер, а также BY и BZ у базисной каретки левого снимка устанавливают нулевые отсчеты, а на правой каретке - значение базисных составляющих BY и BZ вычисленные по формулам, приведенным для стереоавтографа. Аналогично вычисляют и устанавливают отсчет BX.
Ориентирование выполняют обычными приемами, путем устранения поперечных параллаксов движениями x. Если при наблюдении точек модели возникают остаточные поперечные параллаксы, их устраняют движением BZ. Ориентирование планшета относительно модели и подключение координатографа производится так же, как и для стереоавтографа.
Аналогично выполняют ориентирование модели по контрольным точкам. При этом расхождение в положении контрольных точек в плане стабилизируют движениями BY и скосом правой камеры. Расхождения в положении точек по высоте ликвидируются одновременным наклоном проектирующих камер на угол Δω.
При значительных расхождениях точек по высоте на стереопланиграфе можно производить горизонтирование модели методами, которые применяются при обработке аэрофотоснимков. План на стереопланиграфе составляют аналогично изложенному для стереоавтографа.
4.15. Обработка фототеодолитных снимков с некоторыми ограничениями возможна и на стереометрографе.
Известные из полевых работ элементы внешнего ориентирования снимков устанавливают непосредственно на приборе.
Если прибор не снабжен снимкодержателями формата 13×18 см, то для точной центрировки снимков тонком иглой накаливают положение главной точки, которую совмещают центром держателя, а снимки закрепляют на держателях с помощью пластилина.
Негативы закладывают эмульсионным слоем вниз таким образом, чтобы снимок левой точки фотографирования с базиса находился на левом снимкодержателе.
Правый снимок закладывают в правый снимкодержатель.
Точное ориентирование производят по начальным направлениям, разворачивая снимки движениями x.
Для измерений по полученной стереомодели производят смену координат Y на Z с помощью переключателя YZ.
В результате, перемещения по оси Y осуществляют ножным штурвалом, а по оси Z - правым.
Конструктивно стереометрограф позволяет осуществлять перемещение по оси Z в пределах 180 мм, что не всегда удовлетворяет условию отдельных случаев съемки. Для расширения диапазона обрабатываемых отстояний можно применить аффинное преобразование модели.
Аналитическая обработка снимков с использованием ЭВМ
4.16. При аналитических методах обработки снимков измерения выполняют на стереокомпараторе, а для вычислений используют ЭВМ, обладающую соответствующим объемом памяти. Аналитическая обработка материалов наземной стереофотосъемки производится для сгущения сети опорных точек при съемке труднодоступных прижимов и косогоров, при обработке снимков конвергентной съемки оползневых участков и при съёмке плоских территорий с высоких опор. При этом в зависимости от точности определения значений базиса фотографирования и ЭВО снимков можно использовать формулы, соответствующие ориентированной или неориентированной стереофотосъемке.
4.17. Снимки ориентированной стереофотосъемки предварительно проверяют на правильность элементов внутреннего ориентирования камеры, прижим пластинок к прикладной рамке и соответствие ЭВО заданным значениям.
4.18. Прижим фотопластинок к прикладной рамке камеры в процессе фотографирования контролируют с помощью специально устанавливаемого электрического индикатора прижима, описание которого дано в приложении 4. Использование индикатора практически исключает возможность получения снимков, отклоняющихся от плоскости прикладной рамки более чем на ±15 мкм.
4.19. Если при съемке индикатор прижима не использовали, то отклонения плоскости снимка от прикладной рамки камеры находят путем сравнения расстояний между координатными метками негативов Lг с эталонными расстояниями L0г (рис. 21). Если разность ΔL = Lг - L0г не превышает 0,03 мм, то элементы внутреннего ориентирования считаются неискаженными. Если же ΔL > 0,03 мм, то определяют поправки, необходимые для перехода от элементов внутреннего ориентирования камеры к соответствующим элементам ориентирования снимков. В случае оптико-механической обработки снимков определяют лишь поправку δf к фокусному расстоянию камеры
![]() . (18)
. (18)
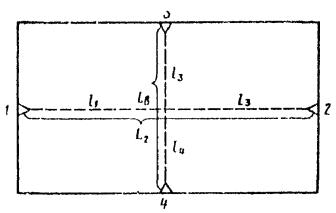
Рис. 21
При аналитической обработке снимков находят поправки к элементам внутреннего ориентирования снимков:
 (19)
(19)
где L0г - расстояние между горизонтальными метками, известное из исследования фототеодолита,
L0в - то же, между вертикальными метками
L01, L02, L03, L04 - расстояния, полученные при исследовании фототеодолита.
4.20. Для определения правильности принятых значений элементов внутреннего ориентирования камеры и ее углового ориентирования в процессе съемки используют способ контрольных направлений, измерения которых производят теодолитом в процессе выполнения полевых работ.
4.21. Фотограмметрические координаты точек контрольных направлений получают по измеренным теодолитом вертикальным и горизонтальным углам
![]() ;
; ![]() , (20)
, (20)
где α′ - горизонтальный угол между направлением оптической оси камеры и направлением на наблюдаемую точку;
β - вертикальный угол на эту же точку.
Горизонтальный угол α′ определяется из выражения
α′ = α + δαц,
где α - угол, измеренный теодолитом, установленным на штатив на место фотокамеры;
δαц - поправка за внецентренность передней узловой точки объектива фотокамеры, определяемая из выражения
![]() , (21)
, (21)
где Y - приближенное значение отстояния до наблюдаемой точки м;
0,1 - расстояние от оси вращения фотокамеры до передней узловой точки объектива (для фотокамеры 13×18), м.
В табл. 6 даны значения поправок δαц с точностью до 1-2″.
Таблица 6
|
Yм |
α, град. |
||
|
10 |
15 |
20 |
|
|
200 |
20″ |
25″ |
35″ |
|
400 |
10 |
15 |
15 |
|
800 |
5 |
5 |
10 |
|
1200 |
3 |
4 |
5 |
4.22. Для определения элементов внутреннего ориентирования фотокамеры и правильности ее углового ориентирования с помощью стереокомпаратора измеряют координаты точек контрольных направлений (xi, zi). При этом в общем случае должно быть не менее трех контрольных направлений. Если элементы внутреннего ориентирования известны, то для определения ошибок углового ориентирования камеры необходимо иметь не менее двух контрольных направлений. Поправки к приближенно известным элементам внутреннего и углового ориентирования фотокамеры находятся из решения уравнений поправок:
где xi, zi - измеренные координаты точек контрольных направлений
lxi = x0i - xi; lzi = z0i - zi
При определении только поправок углового ориентирования в уравнениях (22) используют по четыре последних члена. Если свободные члены уравнений (22) lx = lz ≤ +0,02 мм, то принятые элементы внутреннего и углового ориентирования считаются точными. Предварительное определение вычисленных по измеренным углам координат точек контрольных направлений и сравнение их с измеренными на снимке выполняют в соответствии с приложением 12.
Если lx = lz ≥ 20-30 мкм, то поправки к принятым элементам проектирования находят из решения системы уравнений погрешности вида (22) на ЭВМ. Полученные таким образом поправки используют при дальнейшей аналитической обработке снимков.
4.23. При съемке протяженных косогоров с разреженным геодезическим обоснованием для контроля правильности углового ориентирования камеры на каждой станции определяют не менее двух контрольных направлений. Для определения стабильности элементов внутреннего ориентирования на трех-четырех станциях измеряют не менее четырех контрольных направлений.
4.24. Сгущение сети опорных точек при съемке протяженных косогорных участков производятся путем последовательного соединения независимых моделей, построенных в общей системе фотограмметрических координат с частными началами. Для этого выполняется ориентировочная стереофотосъемка косогора, преимущественно при нормальном и равноотклоненном случаях съемки. Значения базисов фотографирования и их ориентировку (дирекционные углы) в принятой системе координат находят из полевых измерений.
Работы по построению опорной сети состоит из следующих основных этапов:
- составления проекта и подготовки снимков;
- измерения снимков на стереокомпараторе и подготовки исходной информации для вычисления на ЭВМ;
- построения на ЭВМ опорной сети в фотограмметрической системе координат, ее уравнивания и геодезического ориентирования;
- вычисления геодезических координат опорных точек и координат центров фотографирования.
4.25. При составлении проекта сгущения опорной сети отбирают стереопары, покрывающие весь участок съемки без фотограмметрических разрывов. На снимках намечают опорные, контрольные и связующие точки, необходимые для соединения смежных стереомоделей в единую сеть. Одновременно определяют приближенные координаты левого центра фотографирования первой модели участка и приближенный угол поворота x0 между соответствующими осями фотограмметрической и геодезической систем координат (рис. 22).
Рис. 22
4.26. По измеренным на стереокомпараторе координатам опорных и связующих точек находят пространственные фотограмметрические координаты (Xi, Yi, Zi) точек каждой модели ряда с использованием выражений (1); при этом для вычисления берут значения угловых ЭВО снимков, уточненных на основе измеренных контрольных направлений.
Каждую модель строят в общей системе фотограмметрических координат, направление оси абсцисс которой совпадает с направлением базиса первой модели, а дирекционными углами базисов являются соответствующие разности измеренных дирекционных углов (см. рис. 22). Начало координат каждой модели совпадает с левым центром фотографирования.
Соединение моделей в ряд выполняется путем последовательного нахождения координат левых центров фотографирования моделей по одноименным связующим точкам, одна из которых должна располагаться на ближнем плане стыка смежных моделей. Алгоритм построения опорной сети при съемке протяженных косогоров с использованием ЭВМ приведен в приложении 17.
4.27. Снимки конвергентной съемки, выполняемой при исследовании оползневых участков, обрабатывают аналитическим методом. При этом для контроля за прижимом пластинок к прикладной рамке камеры и определения правильности углового ориентирования камеры в процессе съемки на каждой станции измеряют не менее четырех контрольных направлений. Координаты точек получают на основе выражений (1) или (4) с использованием уточненных по контрольным направлениям значений ЭВО.
4.28. Снимки с приближенно известными ЭВО, получаемые при съемке с высоких опор территории железнодорожных станций и других плоских участков земной поверхности со сложной ситуацией, обрабатывают аналитическим методом с построением моделей, геодезическое ориентирование которых выполняют по опорным точкам. При этом используют зависимости, приведенные в п. 17.
Алгоритм аналитической обработки снимков наземной стереофотосъемки приведен в приложении 18.
4.29. Топографические планы, продольные и поперечные профили и другую графическую документацию при аналитических методах обработки материалов наземной стереофотосъемки получают на основе геодезических координат точек, вычисленных с помощью ЭВМ. При съемке железнодорожных станций топографический план составляют пикетным способом с нанесением на основу получаемых геодезических координат точек ситуации и рельефа. План сортировочных горок составляют методом поперечников.
4.30. Необходимые при крупномасштабных съемках железнодорожных станций и промышленных площадок линейные обмеры инженерных сооружений выполняют также путем измерения снимков на стереокомпараторе. При этом необходимые данные получают либо аналитически, используя разности координат соответствующих точек, либо графически, выполняя построения в крупных масштабах.
Таким путем обмеряют стрелочные переводы и определяют координаты их центров. В этом случае по найденным из аналитического решения координатам математического центра, острика, концов рельс и нескольких точек на нитках смежных пересекающихся путей (рис. 23) строят эпюру стрелочного перевода в масштабе 1:100. Координаты центра перевода (ЦП) получают затем по эпюре в точке пересечения осей путей с линией, проходящей через математический центр крестовины (МЦ) и предельный столбик. Равенство расстояний между математическим центром крестовины и центром перевода, известным для данного типа крестовины, служит контролем правильности определений. Марки крестовины находят по углу пересечения отклоненного и основного путей. При необходимости вычисляют координаты флюгарки.
Рис. 23.
1 - стрелочная тяга (флюгарка); 2 - ось основного пути; 3 - контррельс; 4 - ось отклоненного пути; 5 - предельный столбик
4.31. В результате аналитической обработки снимков составляют также ведомость геодезических координат элементов ситуации, являющуюся дополнением к графической документации и содержащую точки и сооружения.
V. ИСПОЛЬЗОВАНИЕ МАТЕРИАЛОВ НАЗЕМНОЙ СТЕРЕОФОТОСЪЕМКИ ПРИ РЕШЕНИИ ИНЖЕНЕРНЫХ ЗАДАЧ
Измерения на стереомодели при изысканиях трасс на прижимных участках
5.1. На труднодоступных скальных косогорах, обрывистых и прижимных участках топографические планы, получаемые в результате обработки фототеодолитных снимков, используют на предварительных стадиях изысканий.
Для повышения детальности изображения крутого прижимного участка при окончательной укладке трассы вместо топографических планов по материалам измерений фототеодолитных снимков целесообразно создавать фронтальные планы. Но для окончательной укладки трассы с учетом ее общего проектного положения, взамен измерений на местности (съемка профилей и вынос трассы от магистрального хода), рекомендуется аналогичные измерения производить на стереоскопической модели местности, получаемой в результате ориентирования фототеодолитных снимков на стереокомпараторе, стереоавтографе и других универсальных приборах.
5.2. Если фототеодолитные снимки используют при окончательной укладке трассы, то при выполнении полевых работ соблюдают следующие условия:
1. Базисы размещают приблизительно параллельно простиранию рельефа косогора и применяют нормальный случай съемки.
2. Длину базиса съемки устанавливают исходя из требования точности получения координат точек местности на последней стадии изысканий.
Необходимую точность измерения
длины базиса ![]() определяют по формуле
определяют по формуле
![]() ,
,
где ml - допустимая ошибка положения точки в плане;
Ymax - отстояние до наиболее удаленной точки фотографируемого объекта.
3. Базисы фотографирования располагают под одинаковым азимутом или дирекционным углом (A1B1 и A2B2 на рис. 24).
Рис. 24
Допустимая разность дирекционных углов базисов (в сек) вычисляется по формуле
![]() . (24)
. (24)
4. Контрольные точки следует размещать в зоне предполагаемого положения трассы с расчетом их использования для выноса на местность запроектированной трассы или створов и точек, необходимых для производства работ. Эти контрольные точки должны быть закреплены на местности и перед съемкой замаркированы.
5.3. При трассировании по стереомодели местности в условиях обрывистого рельефа характерными разрезами местности являются:
- продольный горизонтальный или наклонный (близкий к горизонтальному) разрезы на уровне проектируемой трассы плоскостями, перпендикулярными плоскости фототеодолитного снимка. Эти разрезы характеризуют изменение простирания рельефа местности на проектных отметках и заменяют при укладке трассы план в горизонталях, являясь для обрывистого рельефа линией нулевых работ (рис. 25, а, б).
Рис. 25:
1 - продольный разрез; 2 - трасса
Продольный разрез местности дает уже в процессе изысканий границы полки, которая получится после взрыва и сброса породы с полки;
- рельефы с вертикальными плоскостями, перпендикулярными оси пути - поперечные профили в характерных местах;
- разрез с вертикальной плоскостью, проходящей через ось пути - продольный профиль.
5.4. Процесс трассирования включает следующие основные этапы:
- составление продольных разрезов (построение линии нулевых работ);
- проектирование плана трассы с помощью продольного разреза местности;
- составление поперечных профилей;
- составление продольного профиля.
5.5 Характерные разрезы местности составляют по стереомодели местности, построенной на стереоавтографе по схеме «стереомодель - координатограф (план)». Измерения выполняют после ориентирование модели местности по контрольным точкам так же, как и при составлении топопланов.
Горизонтальный разрез, представляющий собой горизонталь с данной отметкой, вычерчивается на планшете после установки на счетчике высот отметки разреза Hφ последовательными перемещениями марки по модели движениями X и Y прибора.
Наклонный разрез с уклоном ip строят в результате последовательного определения на планшете положения точек с отметками
Hφi = Hφ0 + Xφiip, (25)
где Hφi - отметка текущей точки разреза;
Hφ0 - отметка начальной точки (при Xφ0 = 0);
Xφi - фотограмметрическая абсцисса точки разреза.
При съемке точек наклонного разреза марку перемещают штурвалом на следующую характерную точку, для которой отсчитывают абсциссу Xφi и вычисляют отметку Hφi. Далее штурвалом Z марку перемещают до получения отметки Hφi, после чего точку разреза накалывают на планшет и подписывают.
Проектирование плана трассы выполняют на планшете, на котором ранее построен продольный разрез или план в горизонталях.
На стадии предварительных изысканий положение основных точек трассы, направлений поперечных профилей и их пикетов определяют графически по плану трассы.
На последующих стадиях изысканий укладку вариантов плана трассы, выбранного в результате графических построений, производят аналитически. Аналитическим способом определяют направления поперечных профилей в фотограмметрической системе координат.
5.6. Съемку профилей выполняют по схеме «план трассы (координатограф) - стереомодель».
Работа по этой схеме состоит в перенесении на модель местности направлений, запроектированных на плане (створов), определении отметок точек и расстояний между ними в этих створах.
При съемке продольного профиля по трассе ассистент оператора перемещает карандаш координатографа по направлению плана трассы. В это время оператор движением ножного диска удерживает марку на стереомодели местности.
Когда марка достигает следующего перелома профиля, движение маховичков чертежного стола останавливается. Точку отмечают карандашом на плане трассы или накалывают (при этой работе удобно карандаш заменить иглой), обводят кружком и около нее выписывают ее номер. На счетчике высот отсчитывают отметку точки и записывают в ведомость.
Образец заполнения ведомости съемки точек продольного профиля трассы приведен в табл. 7.
Таблица 7
|
№ пп |
Описание точек |
Отметки H |
Расстояние, измеренное по плану, мм |
Расстояние на местности, м |
Пикетаж исходной точки |
Пикетаж снятых точек профиля |
|
23 |
Впадина |
139,40 |
+20,4 |
40,8 |
пк 21 |
пк 21+40,8 |
|
24 |
Выступ |
144,75 |
+24,2 |
48,4 |
пк 21 |
пк 21+48,4 |
Примечание. Масштаб плана трассы 1:2000.
Расстояние от исходной точки с известным пикетажом до определяемой измеряют циркулем-измерителем, а на местности - по поперечному масштабу. Аналогично выполняют и съемку поперечных профилей.
При уточнении съемки поперечных профилей:
- производят аналитическую укладку трассы, запроектированной на плане с учетом поперечных профилей;
- определяют фотограмметрические координаты оси пути на поперечнике;
- вычисляют углы δп, характеризующие ориентировку снимаемых поперечников в фотограмметрической системе координат.
Съемку начинают с установки острия карандаша координатографа на точку оси трассы на планшете. Если отсчеты фотограмметрических координат X, Y не будут с точностью 0,02 мм равны предварительно вычисленным Xtг, Ytг, то марку перемещают штурвалами по оси X и Y до получения нужных отсчетов, после чего отсчитывают отметку H.
Для съемки следующей точки профиля ассистент перемещает карандаш координатографа по направлению поперечника, показанному на плане трассы. Оператор останавливает ее на переломе профиля и сравнивает полученные координаты с предварительно вычисленными. При расхождениях более 0,02 мм марку переставляют движениями штурвала X и Y и делают новое приближение. Измеренные координаты точек поперечника записывают в ведомости и по ним затем вычисляют фотограмметрические координаты Yφп и Hп.
Расстояние от оси трассы до точки поперечника вычисляют по формуле
L = (Yt - Yφ)secδп.
Поперечник строят в нужном масштабе по полученным расстояниям и отметкам.
Составление фронтальных планов
5.7. Для решения инженерно-геодезических задач по определению оптимального положения трассы и сооружений на круто-косогорных и обрывистых участках местности по материалам наземной стереофотосъемки в дополнение к топографическим планам, являющимся ортогональной проекцией местности на горизонтальную плоскость, целесообразно изготовлять фронтальные планы, где рельеф изображается фронталями, а элементы ситуации проектируются на вертикальную плоскость. Фронтальные планы составляют на участки территории со скалами, углы наклона которых достигают 45° и более. Плоскость проекции, в которой составляют фронтальный план, должны быть примерно параллельна направлению простирания склона.
5.8. Пространственное положение точек местности на фронтальном плане определяется абсциссой Xмφ.п, высотой Zмφ.п и отстоянием Yмφ.п от фронтальной плоскости проекции V (рис. 26).
Рис. 26
Связь систем координат фронтального плана (F, Xφ.п, Yφ.п, Zφ.п) и геодезической системы координат OXYZ для точки M склона в соответствии с рис. 26 выражается следующими зависимостями:
 (26)
(26)
где ε - угол поворота оси абсцисс Xφ.п относительно Xг (дирекционный угол фронтальной плоскости);
Xмφ.п, Yмφ.п, Zмφ.п, Xмг, Yмг, Zмг - координаты т.м. в системе фронтального плана и в геодезической;
XFг, YFг, ZFг - геодезические координаты начала системы фронтального плана.
Формулы перехода от системы координат фронтального плана к геодезической системе координат, в которой составляются топографические планы, имеют следующий вид:
 (27)
(27)
Координаты фронтального плана связаны с фотограмметрической системой координат, принятой при наземной стереофотосъемке S, Xφ, Yφ, Zφ следующими зависимостями:
 (28)
(28)
где φ - угол поворота оси Xφ.п относительно оси абсцисс Xφ фотограмметрической системы;
Xмφ.п, Ysφ.п, Zsφ.п - координаты левого центра фотографирования S в системе координат фронтального плана.
Приведенные зависимости позволяют переходить от фронтальных планов к топографическим и наоборот с использованием получаемых при обработке снимков фотограмметрических координат точек местности.
Изображение отдельных форм при проектировании рельефа на вертикальную плоскость и основные свойства фронталей приведены в приложении 19.
5.9. Фронтальные планы по материалам наземной стереофотосъемки можно составлять аналитическим, оптико-механическим и дифференцированным способами.
5.10. При аналитическом способе для получения координат точек фронтального плана используют зависимости (1) или (4) и составление фронтального плана выполняют нанесением на подготовленный планшет пикетных точек по координатам Xφ.п, Zφ.п. Отстояния Yφ.п каждой пикетной точки подписывают на планшете. Интерполируя затем между полученными пикетами линии равных отстояний (фронтали) через установленные интервалы (в м) наносят их положение на планшет. Аналогичным путем вычерчивают ситуацию.
5.11. Составление фронтальных планов удобно выполнять на универсальных приборах типа стереоавтографа, предназначенных для обработки снимков наземной стереофотосъемки, а также практически на всех приборах, используемых при обработке аэроснимков (стереопланиграф, стереометрограф, стереопроектор, стереограф, мультиплекс).
5.12. Учитывая, что обработка снимков наземной стереофотосъемки при проектировании рельефа и ситуации местности на вертикальную плоскость аналогична обработке аэроснимков, для составления фронтальных планов наиболее удобными являются стереофотограмметрические приборы воздушной съемки.
При использовании этих приборов обработка снимков наземной стереофотосъемки производится известными в практике стереофотограмметрии методами. Особенностью является возможность ориентирования снимков в приборах по известным из геодезических измерений угловым и линейным установочным элементам. В связи с этим при использовании приборов воздушной съемки для обработки снимков наземной стереофотосъемки возникают дополнительные требования к тщательному определению мест нулей всех шкал приборов.
5.18. Фронтальные планы обрывистых участков можно успешно составлять также с помощью приборов дифференцированного метода обработки аэроснимков. При этом для рисовки фронталей на стыках можно использовать топографические стереометры типа СТД-2, а составление фронтальных планов по снимкам с зарисованными фронталями можно производить с помощью одиночного проектора от мультиплекса или фотографическим путем с использованием фототрансформаторов.
Ориентирование контактных отпечатков обрывистых склонов при рисовке фронталей на стереометре выполняют так же, как при обработке аэроснимков в следующей последовательности.
1. Определяют места нулей всех шкал прибора путем его юстировки по контрольным юстировочным сеткам.
2. После установки на всех корректорах нулевых отсчетов контактные отпечатки, наклеенные на жесткую основу, укладывают в кассеты, совмещают главные точки с центрами вращения кассет.
3. Снимки ориентируются по начальным направлениям движениям xл и xп.
4. На корректорах ΔH иγl устанавливают отсчеты, соответствующие приращению абсцисс BY и углу скоса оптических осей, определенных при полевых измерениях
![]() ;
; ![]() ,
,
где d - длина линейки корректора ΔH;
Y0 = Ysл - Y0φ;
φ0 - угол скоса;
Yφ - ординаты начальной опорной точки.
5. Проверяют соответствие вычисленных и измеренных разностей продольных параллаксов на четырех опорных точках, расположенных по углам стереопары, при этом
![]() ,
,
где
ΔYi = Y0φ - Yi; ![]() .
.
Если расхождения вычисленных и измеренных разностей продольных параллаксов лежат в пределах ±0,04 мм, то считают ориентирование выполненным. При больших расхождениях ориентирование уточняют с помощью корректоров стереометра так же, как при ориентировании аэроснимков.
Устанавливая затем рассчитанные для каждой фронтали отсчеты на параллактическом винте стереометра, положение фронталей находят путем стереоскопического трассирования измерительной нитью стереометра.
Применение стереометров для рисовки фронталей возможно при отстоящих, соответствующих 6B-2,5B, и углах скоса ±14°.
5.14. При съемке обрывистых участков с крутизной склонов более 75-80° вместо графических фронтальных планов могут создаваться фронтальные фотопланы или фотосхемы, позволяющие максимально использовать фотоизображение местности при проектировании инженерных сооружений.
При нормальном случае съемки и расположении базиса, примерно, параллельно направлению простирания склона для получения фотопланов необходимо привести снимки к заданному масштабу относительно выбранного положения фронтальной плоскости и затем смонтировать их в единое изображение. Для этой цели можно использовать фототрансформаторы или увеличители с соответствующим размером прикладной рамки. Снимки к заданному масштабу приводят по известным расстояниям между координатными метками.
Определение объемов земляных работ
5.15. Материалы наземной стереофотосъемки можно использовать для определения объемов земляных работ в процессе строительства сооружений и разработки карьеров.
Объемы земельно-скальных работ при устройстве полок на косогорных участках местности, земельных масс в карьерах и котловинах, насыпей и плотин определяют по снимкам повторной стереофотосъемки следующими способами:
- вертикальной сетки, который применяют, когда стенка экскаваторного забоя отвесна и высота ее более 2-3 м;
- горизонтальной сетки, который используют при вертикальной планировке, зачистке дна котлована под проектную отметку и т.п., когда высота насыпи или выбора грунта не превышают 3-4 м;
- способом профилей, применяемым совместно со способом горизонтальной сетки и позволяющим определять объемы земляных работ на больших площадях.
Во всех случаях до начала разработки котлована, карьера полки или насыпи и после выработки проводят фототеодолитную съемку объекта с концов постоянного базиса фотографирования при нормальном положении оптической оси фотокамеры (рис. 27).
Рис. 27
5.16. Способы определения объемов земляных работ по материалам наземной стереофотосъемки основаны на изменении фотограмметрических координат углов вертикальной или горизонтальной сетки, нанесенной на снимки, выполненные с закрепленных на местности точек фотографирования. По изменениям фотограмметрических координат определяют объемы получающихся в результате выработки или насыпи грунта элементарных фигур. Размеры их зависят от размеров принятой сетки, суммируя которые находят общий объем выработки.
Камеральную обработку снимков при определении объемов земляных работ выполняют на стереокомпараторе или стереоавтографе.
Определение осадок и деформаций инженерных сооружений
5.17. Определение осадок и деформаций инженерных сооружений основано на последовательном фотографировании исследуемого объекта в период действия деформирующих сил с постоянных точек фотографирования и при неизменных ЭВО снимков. При фотографировании с одной точки определяют значения деформации в одной вертикальной плоскости (фотограмметрический способ), съемка объекта с жесткого базиса позволяет определить значения деформаций в пространстве (стереофотограмметрический метод).
5.18. При фотограмметрическом методе деформации определяют измерением на стереокомпараторе координат специальных марок, установленных на изучаемом объекте.
По измеренным координатам марок x и z находят их пространственные фотограмметрические координаты X и Z по формулам:
![]() ;
; ![]() ,
,
где Yi - расстояние от наблюдаемой марки до фотокамеры.
Аналогично обрабатывая снимки повторной съемки деформаций, определяют по разностям пространственных фотограмметрических координат:
 (29)
(29)
где Xi, Zi - фотограмметрические координаты точки объекта при первой съемке;
X′i, Z′i - фотограмметрические координаты точки объекта при последующей съемке.
5.19. При стереофотограмметрическом методе определения деформаций в динамике исследуемого объекта судят по результатам сравнения фотограмметрических координат идентичных точек, полученных из наблюдений разных циклов.
Фотограмметрические координаты деформационных марок вычисляют по формулам нормального случая съемки, а величины смещения марок из измерений двух стереопар определяют по формулам:
 (30)
(30)
где
Δpi = p′i - pi.
Величина деформации может быть также определена путем последовательного наблюдения двух левых и двух правых снимков, полученных в разных циклах наблюдений.
В этом случае:
 (31)
(31)
где
Δx1i = x′1i - x1i; Δx2i = x′2i - x2i - смещение изображений идентичных точек левого и правого снимков по оси абсцисс;
Δz1i = z′1i - z1i - смещение изображений по оси ординат на левом снимке.
Приложение 1
ФОТОТЕОДОЛИТНЫЙ КОМПЛЕКТ Photeo-19/1318
Фототеодолитный комплект Photeo-19/1318 содержит следующие инструменты и оборудование:
а) фотокамеру;
б) оптический теодолит;
в) двухметровую базисную рейку;
г) три взаимозаменяемых трегера и три марки;
д) три взаимозаменяемых штатива;
е) двадцать четыре деревянных кассеты;
ж) юстировочное устройство к фототеодолиту.
Инструменты и вспомогательное оборудование укладывают в ящики и брезентовые чехлы, удобные для переноски.
Фотокамера, изготовленная из легкого сплава, снабжена объективом «Ортопротар» с фокусным расстоянием 193-194 мм, постоянной диафрагмой с относительным отверстием 1:25 и постоянным желтым светофильтром.
Полезные углы изображения по горизонтали ~47°, по вертикали ~34° (при положении объектива в центре). Для увеличения вертикального захвата местности объектив можно перемещать в вертикальных направляющих на 30 мм вверх и 45 мм вниз от среднего положения, что обеспечивает вертикальный захват вверх от горизонта ~26° и вниз ~29°.
Величину перемещения объектива по вертикали фиксируют с помощью специального указателя горизонта, который представляет собой коллиматор, укрепленный с внутренней стороны камеры. Входное отверстие коллиматора расположено в оправе объектива.
Максимальная дистория объектива не превышает ±5 мк. В фокальной плоскости его расположена металлическая фигурная прикладная рамка, к которой при съемке прижимается эмульсионный слой фотопластинки.
Для фиксирования главной точки снимка на прикладной рамке имеются четыре координатных метки в виде зубчиков с круглыми отверстиями. Прямые, соединяющие центры круглых отверстий, являются соответственно осями x-x и z-z снимка, а их пересечение должно определять положение главной точки снимка. На прикладной рамке укреплена также пластинка с маркировкой значения фокусного расстояния камеры, фиксирующегося на каждом снимке.
Для автоматической нумерации снимков и фиксирования вида съемки камера снабжена нумератором и указателем вида съемки. Барабанчики нумератора и указателя вида съемки позволяют установить номера снимков от 0 до 99 и шесть положений вида съемки: левая точка базиса - нормальный (A), скос влево (AL), скос вправо (AR); правая точка базиса - нормальный (B), скос влево (BL), скос вправо (BR).
В прикладной рамке есть четыре винтовых отверстия для укрепления юстировочного приспособления.
Камера снабжена устройством для прижатия фотопластинки в момент съемки к прикладной рамке.
Кассеты вставляют в пазы подвижной рамки когда рама с помощью барабанчиков отжата от прикладной рамки. Пластинку прижимают к прикладной рамке после открытия крышки кассеты. В рамку вместо кассеты может быть вставлено матовое стекло, которым закрывают камеру в нерабочем положении. Камера имеет горизонтальное вращение, регулируемое микрометренным и зажимным винтами. На верхней плоскости камеры укреплено ориентирное устройство, предназначенное для установки камеры в заданное положение относительно базиса фотографирования. Ориентирное устройство состоит из зрительной трубы с 21-кратным увеличением, вращающейся вокруг вертикальной оси, лимба с минимальными делениями через 10 (20°) и отсчетного микроскопа. Отсчет по горизонтальному лимбу производят между противоположными штрихами лимба, отличающимися друг от друга на 180° (или 200°).
При повороте призмы, установленной перед объективом зрительной трубы, с помощью барабанчика визирный луч наклоняется.
Угол отсчитывают по барабанчику и вертикальному кругу. Для грубой установки ориентирного устройства в стандартные положения (нормальный случай, скос влево, скос вправо) имеются соответствующие штрихи с маркировкой случая съемки (A, AL, AR, B, BL, BR).
На верхней плоскости камеры имеются два взаимноперпендикулярных цилиндрических уровня для установки вертикальной оси вращения камеры в отвесное положение. Здесь же находится контрольная площадка для установки юстировочного уровня. В комплект входит юстировочное устройство, предназначенное для поверки совпадения нулевого диаметра ориентирующего приспособления с направлением оптической оси фотокамеры. Устройство крепится к прикладной рамке камеры, при этом лупа с шестикратным увеличением, перемещающаяся по вертикальной направляющей, вместе с объективом камеры образует вспомогательную зрительную трубу, в которой биссектр является сеткой нитей.
В фототеодолитный комплект входит также оптический теодолит - тахеометр Theo 030, предназначенный для работ по геодезическому обоснованию съемки и измерения параллактических углов при определении величины базиса фотографирования.
Теодолит имеет зрительную трубу с внутренней фокусировкой и 25-кратным увеличением. Отсчет по вертикальному и горизонтальному кругам производят с помощью штрихового микроскопа, окуляр которого расположен рядом с окуляром зрительной трубы. В поле зрения микроскопа видны горизонтальный (HZ) и вертикальный круги, на которых показаны градусы (или грады) и десятки минут (сантиград). Минимальное деление 1′ (1°). Отсчет производят по вертикальным штрихам с точностью до 0′1 (0°,1).
Для удобства при измерении горизонтальных углов методом повторений теодолит снабжен устройством, обеспечивающим совместное и раздельное перемещения лимба относительно алиднды.
Зрительная труба теодолита имеет площадку для укрепления уровня с целью использования теодолита для геометрического нивелирования.
Для определения длины базисов фотографирования в комплект входит разборная базисная двухметровая рейка, состоящая из двух металлических трубок с рамками на концах. Внутри трубок располагаются инварные стержни со стеклянными визирными марками на концах. Рейка имеет круглый уровень для приведения ее в горизонтальное положение и коллиматор для установки рейки перпендикулярно к направлению измеряемой линии. В комплекте имеется также три металлических марки и взаимозаменяемых трегера для установки инструментов на штативах. Это обеспечивает производство геодезических работ по трехштативной схеме.
Поверки приборов
Поверки теодолита, базисной рейки, трегеров и марок производят методами, известными в геодезической практике и широко описанными в геодезической литературе.
Фототеодолитная камера должна обеспечивать выполнение следующих условий:
- вертикальная ось вращения камеры должна совпадать с осью вращения ориентирного устройства;
- оптическая ось камеры должна быть перпендикулярна плоскости прикладной рамки и вертикальной оси вращения инструмента;
- оптическая ось камеры должна пересекаться с осью вращения инструмента;
- плоскость юстировочной площадки должна быть перпендикулярна плоскости прикладной рамки;
- оси цилиндрических уровней, установленных на корпусе камеры, должны быть перпендикулярны оси вращения камеры;
- ось вращения призмы ориентирного устройства должна быть перпендикулярна вертикальной оси вращения инструмента и оси зрительной трубы;
- при совмещении нулевых штрихов ориентирного устройства визирная ось зрительной трубы и геометрическая ось камеры должны лежать в одной плоскости;
- линии, соединяющие координатные метки на прикладной рамке прибора (x-x и z-z), должны находиться в одной плоскости, быть взаимноперпендикулярными и пересекаться с оптической осью камеры (в главной точке снимка). При этом ось z-z при правильной установке прибора по уровням должна быть вертикальна;
- камера и кассеты не должны в закрытом положении пропускать свет.
Рабочие поверки фототеодолитной камеры выполняют в следующей последовательности.
1. Цилиндрические уровни на корпусе камеры устанавливают обычным способом, в положение, когда их оси перпендикулярны оси вращения инструмента. Эту операцию выполняют при вставленной в камеру кассете с фотопластинкой.
2. Для определения перпендикулярности оптической оси камеры вертикальной оси вращения инструмента камеру горизонтируют по предварительно исправленным уровням. После этого на соответствующую плоскость юстировочной площадки устанавливают выверенный накладной уровень, пузырек которого при соблюдении этого условия должен находиться на середине. Если пузырек контрольного уровня отклоняется более чем на половину деления (30″), то установочные уровни приводят в соответствие с ним с помощью исправительных винтов этих уровней.
То же самое выполняют и в направлении, перпендикулярном направлению оптической оси. При этом определяется перпендикулярность оси вращения инструмента линии x-x прикладной рамки.
При значительных отклонениях контрольного уровня от установочных (более трех-четырех делений) камеру следует исправить.
3. Для проверки правильности вращения призмы ориентирующего устройства, после горизонтирования камеры, визируют зрительной трубой на нить отвеса, находящегося в 6-10 м от инструмента, наклонив с помощью барабанчика линию визирования. При этом крест нитей не должен сходить с отвеса более чем на толщину нити отвеса (1-2 мм) в предельном положении призмы. При больших отклонениях инструмент должен быть исправлен.
4. Нулевой диаметр ориентирного устройства должен располагаться в одной плоскости с геометрической осью камеры. Для проверки этого условия на прикладную рамку камеры укрепляют юстировочное устройство, точно совмещая штрихи на стеклянной пластинке с центрами координатных меток прикладной рамки камеры. Установив затем на горизонтальном круге ориентирного устройства отсчет, равный 0°00′,0, вращением камеры наводят зрительную трубку на удаленную четко очерченную точку местности. Наблюдая эту же точку через лупу ориентирного устройства, которая в сочетании с объективом камеры образует зрительную трубку, определяют положение наблюдаемой точки относительно биссектрисы. При правильном положении ориентирного устройства на камере наблюдаемый предмет должен располагаться точно в центре устройства.
При несоблюдении такого положения наводящим винтом камеры вводят наблюдаемую точку в биссектор и, ослабив зажимные винты лимба ориентирного устройства, действуя исправительными винтами, поворачивают ориентирное устройство на корпусе камеры до положения, когда вертикальная нить трубы совпадет с наблюдаемой точкой. После закрепления зажимных винтов необходимо повторять поверку.
5. При правильной установке камеры по уровням ось прикладной рамки должна быть вертикальной. Для проверки этого условия фотографируют неподвижный отвес, вывешенный в 8-10 м. Снимок затем устанавливают в стереокомпараторе и точно ориентируют по оси z-z. Если эта ось была при съемке вертикальна, то марка, перемещаемая штурвалом z, не должна сходить с изображения отвеса на снимке. Отклонения не должны превышать 0,02 мм.
6. Взаимная перпендикулярность осей x-x и z-z проверяется на эталонных пластинках, получаемых следующим образом.
Фотокамеру устанавливают в темной комнате объективом вниз и на плоскость прикладной рамки укладывают неэкспонированную пластинку, которую прижимают толстым стеклом. Закрыв камеру сверху светонепроницаемой тканью, на открытый объектив направляют источник света и засвечивают пластинку. Получают две-три эталонные пластинки. После фотообработки эталонные пластинки ориентируют в стереокомпараторе по одной из осей (x-x). Наведя марку на одну из вертикальных меток, движением штурвала z переводят ее на другую метку. Отклонение марки не должно превышать 0,02 мм. Одновременно измеряют координаты меток и вычисляют расстояние между метками и геометрическим положением главной точки (см. п. 8 настоящего приложения).
7. К рабочим поверкам относится также определение элементов внутреннего ориентирования камеры - фокусного расстояния камеры и положения главной точки снимка относительно координатных осей. Для этого установленный на местности фототеодолит тщательно горизонтируют в направлении, где имеются в дальнем плане (3-4 км) несколько четких контурных точек (фабричные трубы, колокольни, столбы, мачты и т.п.), и производят фотографирование на 2-3 пластинки.
Над колышком, определяющим положение объектива фототеодолита, устанавливают теодолит и измеряют с точностью ±3-5″ горизонтальные и вертикальные углы на три-пять удаленных точек местности, располагающихся так, как показано на рисунке.
После фотообработки снимков их ориентируют в стереокомпараторе и определяют координаты точек, на которые были измерены углы.
Элементы внутреннего ориентирования вычисляют на основании следующих зависимостей.
Пусть 0′ - начало координат снимка, 0 - главная точка снимка с координатами x0 и z0 (см. рисунок).
a, b, c - изображение на снимке некоторых удаленных точек;
α1 и α2 - горизонтальные углы между направлениями на эти точки, измеренные теодолитом.
Из треугольников b0SO, a0SO и c0SO получим:
f = Δctgε;
f = (d1 - Δ)ctg(α - ε);
f = (d2 + Δ)ctg(α + ε).
Неизвестными являются Δ и ε.
После незначительных преобразований на основании этих выражений будем иметь:
![]() ;
;
Δ = d1(ctgα1ctgε + 1)sin2ε = d2(ctgα2ctgε - 1)sin2ε.
Если в процессе фотографирования камеру ориентировать на среднюю точку то <ε всегда может быть достаточно мал, поэтому
Δ = εd1(ctgα1 + ε) = εd2(ctgα2 - ε).
Определив значения ε и Δ, получим:
f = Δctgε и x0 = x0 - Δ.
Используя значения измеренных теодолитом вертикальных углов β, вычислим для точек a, b, c координаты zвыч из выражений:
![]() ;
;
![]() ;
;
![]() .
.
Сравним их с измеренными по снимкам:
z01 = zaизм - zaвыч;
z02 = zbизм - zbвыч;
z03 = zcизм - zcвыч.
Для контроля и повышения точности определения элементов внутреннего ориентирования необходимо фотографировать с одной станции две независимые системы, по три точки в каждой. В каждой такой системе одна из точек центральная, по которой ориентируется геометрическая ось камеры, а две другие должны располагаться по возможности на краях снимка.
Значение элементов внутреннего ориентирования (f, x0 и z0) получают как среднее из двух измерений.
Следует заметить, что определять элементы внутреннего ориентирования необходимо только после того, как установлено, что кассеты и прижимное устройство камеры обеспечивают плотное прилегание пластинок к прикладной рамке камеры.
Схема определения элементов внутреннего ориентирования и образец ее заполнения приведены в табл. 1 и 2.
Таблица 1
Измеренные горизонтальные и вертикальные углы и координаты точек снимка
|
Горизонтальные углы α |
Вертикальные углы β |
Координаты точек |
||
|
x, м |
z, м |
|||
|
a. столб линии связи |
15°59′01″ |
+0°27′01″ |
-56,22 |
+1,67 |
|
b. церковь |
20°36′32″ |
+0°14′10″ |
-2,50 |
+0,87 |
|
c. отдельное дерево |
|
+0°19′21″ |
+70,10 |
+1,19 |
Таблица 2
Вычисление элементов внутреннего ориентирования
|
Результаты |
Обозначения |
Результаты |
|
|
d1 = xb - xa |
+55,72 |
d1 - Δ |
+57,925 |
|
d2 = xc - xb |
+72,60 |
d1 - ε |
+16,8807 |
|
d1 = d2 |
128,32 |
ctg(α1 - ε) |
3,3469 |
|
ctgα1 |
3,4911 |
f |
198,67 |
|
ctgα2 |
2,6592 |
fср |
198,86 |
|
d2ctgα2 |
193,06 |
tgβa |
+0,00786 |
|
d1ctgα1 |
194,52 |
tgβb |
+0,00412 |
|
d2ctgα2 - d1ctgα1 |
-1,46 |
tgβc |
+0,00568 |
|
lgε |
-0,01138 |
ftgβa |
+1,524 |
|
ε |
-0,3906 |
ftgβb |
+0,799 |
|
d2ctgα2ε |
-2,195 |
ftgβc |
+1,091 |
|
-ε2d2 |
-9 |
cos(α1 - ε) |
0,96815 |
|
Δ |
-2,204 |
cosε |
0,99994 |
|
d1ctgα1ε |
-2,212 |
cos(α2 + ε) |
0,93995 |
|
+ε2d1 |
+7 |
zaвыч |
+1,59 |
|
Δ |
-2,205 |
zbвыч |
+0,80 |
|
x0 = xb - Δ |
-0,30 |
zcвыч |
+1,16 |
|
d2 + Δ |
+70,395 |
z0 = za - zaвыч |
+0,07 |
|
d2 + ε |
+19,5726 |
z0 = zb - zbвыч |
+0,08 |
|
ctg(α2 + ε) |
2,75392 |
z0 = zc - zcвыч |
+0,03 |
|
f |
193,86 |
zоср |
+0,06 |
8. Для определения правильности прилегания плоскости пластинок к прикладной рамке камеры производят контрольную съемку с использованием всех 24 кассет комплекта. Предварительно рекомендуется тщательно осмотреть состояние кассет (пружины и лапки, удерживающие пластинку в кассете), прижимное устройство и протереть бархоткой ребра прикладной рамки. По полученным снимкам в стереокомпараторе измеряют координаты меток после ориентирования снимка вдоль оси x-x прибора по горизонтальным меткам.
После этого вычисляют расстояния между метками и между началом координат (т. 0) и соответствующими метками (см. рис. 2 Указаний):
![]() ;
;
![]() ;
;
l3 = z3 - z1;
l4 = z1 - z4;
L2 = x2 - x1;
Lb = z3 - z4.
Аналогичные измерения выполняют и по эталонным снимкам (см. п. 6 настоящего приложения), получая соответственно L02, L0b, l01, l02, l03, l04.
Если L02 = Lг и L0b = Lb с точностью ±0,03 мм, то прилегание пластинок можно считать нормальным. При больших расхождениях необходимо выявить характер и причину неприжима пластинок и принять меры к его устранению.
Сравнивая полученные и эталонные отрезки li и l0i, получают разности Δli = li - l0i, по которым судят о характере неприжима. При этом параллельное смещение пластинки (параллельный неприжим) имеет место, если Δl1 = Δl2 и Δl3 = Δl4.
В этом случае ![]() .
.
Если плоскость пластинки непараллельна плоскости прикладной рамки, Δl1 ≠ Δl2 и Δl3 ≠ Δl4.
Неприжим может быть по следующим основным причинам:
- погнутость угольников в кассетах;
- ослабление кассетных пружин;
- неисправность или недостаточный ход прижимного устройства;
- кривизна фотопластинок.
Так как кассеты комплекта 1318 рассчитаны на пластинки толщиной от 1,5 до 2,5 мм, а фототеодолитные пластинки имеют в среднем толщину 1,1-1,2 мм, то для обеспечения хорошего прижима при зарядке кассет под пластинку следует подкладывать такое же стекло (использованную пластину).
При недостаточном ходе прижимного устройства, когда может образоваться параллельный неприжим или перекос пластинки, следует несколько отогнуть лапки, удерживающие пластинку в кассете, что позволит пластинке дополнительно перемещаться вперед и прижаться к прикладной рамке камеры.
Приложение 2
ФОТОТЕОДОЛИТНЫЙ КОМПЛЕКТ UMK 10/1318
Последняя модель фототеодолитного комплекта UMK 10/1318 содержит:
а) фотокамеру;
б) 24 кассеты;
в) набор цветных светофильтров;
г) юстировочное устройство;
д) видоискатель;
е) ящик электрических батарей;
ж) дно штатива;
з) визирную марку.
Все составные части комплекта помещены в удобные переносные ящики.
Фотокамера оснащена объективом типа «Lamegon» с фокусным расстоянием 100 мм.
Объектив практически свободен от дисторсии и позволяет получать снимки с полезным размером кадра 120×166 мм. Конструкция объектива позволяет фиксировать среднее съемочное расстояние в восьми положениях от ∞ до 3,6 м. Установленное расстояние можно считывать по шкале; одновременно дополнение к постоянной величине фокусного расстояния фиксируется на фотоснимках.
В фотокамеру встроен центральный затвор, позволяющий выбирать величины экспозиции в пределах от 1 до 1/400 сек, а также экспозицию «от руки».
Диафрагма камеры переменная и может меняться в диапазоне от 1:8 до 1:32.
На фотоснимке изображаются следующие параметры съемки:
- величина фокусного расстояния для отстояния Y = ∞;
- дополнение к величине фокусного расстояния в соответствии с режимом фокусировки;
- номер снимка (от 0 до 72);
- обозначение точки стояния камеры и вида съемки (A, B, AL, AR, BL, BR).
Нижняя часть прибора, держащая систему для ориентирования, оснащена двумя опорами, в подшипники которых вставляют насадку с камерой при помощи цапф, прикрепленных к корпусу камеры. Это позволяет осуществить следующие положения камеры:
- горизонтальное направление съемки при горизонтальном положении формата кадров;
- горизонтальное направление съемки при вертикальном формате кадров;
- съемки с оптической осью, направленной вертикально вверх.
Одинаковое направление оптических осей фотокамеры и системы для ориентирования осуществляется с высокой точностью и контролируется при помощи уровней.
Технические данные
Фотокамера
Фокусное расстояние объектива................................................................................. 100 мм
Максимальная дисторсия............................................................................. От ±5 до ±10 мк
Выдержки затвора В, Т............................................................................... От 1 до 1/400 сек
Числа диафрагмы.................................................................................................... От 8 до 32
Расстояния до объектов съемки............................................ ∞; 00; 25; 12; 8; 6; 5; 4,2; 3,6 м
Угля поля зрения:
горизонтальный.............................................................................................................. 88q
вертикальный.................................................................................................................. 68q
Напряжения питания......................................................................................................... 12 в
Ориентирное устройство
Увеличение зрительной трубы........................................................................................... 16×
Диаметр объектива......................................................................................................... 32 мм
Поле зрения......................................................................................................................... 2,8q
Минимальная дистанция визирования.......................................................................... 0,8 м
Максимальный угол наклона визирного луча................................................................ ±20q
Точность отсчета угла наклона............................................................................................ 1q
Горизонтальный круг
Диапазон измерения............................................................................................ От 0 до 400q
Цена деления шкалы............................................................................................................ 20s
Точность отсчета при помощи микрометра...................................................................... 2ss
Уровни
Диапазон круглого уровня.................................................................................................. 15s
Точность цилиндрических уровней (угол наклона при перемещении пузырька на 2 мм)............................................................................................... 64ss
Приложение 3
ИНДИКАТОР ПРИЖИМА ЦНИИСа
Индикатор позволяет контролировать прижим фотопластинки к плоскости прикладной рамки камеры в процессе фотографирования. Принцип действия устройства заключается в следующем.
В момент прижатия держателя кассеты с фотопластинкой к прикладной рамке камеры (при выдвинутой шторке) стекло нажимает на контакты, прикрепленные к координатным меткам, и замыкает электрическую цепь.
При полном прижиме загораются четыре лампочки. Незагоревшиеся лампочки сигнализируют о недостаточном прижиме на соответствующих координатных метках.
Устройство состоит из электрических контактов, сигнальной системы в виде электроламп и источника питания.
Электрические контакты 1 (рис. 1) вырезают в виде пружины из металлической ленты (хром, никель) и в выпрямленном виде имеют форму полоски с размерами 1,0×8,0 мм при толщине полоски 0,01-0,02 мм.
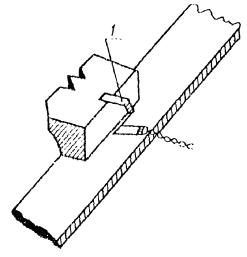
Рис. 1
Для сохранения контактов при вдвигании шторки их приклеивают к меткам на расстоянии 0,4 мм.
Сигнальные лампочки типа СМ-37 укреплены на общей токопроводящей пластине, соединенной с одним из зажимов источника питания через контакты К1, К2, К3, К4 и кнопочного выключателя типа МП-8. Контакты соединены с соответствующими лампочками через резьбу типа РН 10-5 (рис. 2).
Рис. 2
Все устройство заключено в коробку, имеющую четыре окна для лампочек и прикрепляющуюся к фототеодолиту с помощью разъема.
Устройство не вносит изменений в конструкцию фототеодолита, но для подводки электропроводов к контактам необходимо высверлить отверстие диаметром 0,8 мм во внутреннюю полость камеры между двумя барабанами на левой щеке фототеодолита.
Размеры (в см) индикатора прижима, изготавливающего для фототеодолита Photeo-19/1318 «К. Цейсс, Иена», приведены на рис. 3.
Рис. 3:
1 - фототеодолит; 2 - опорная скоба
Применение аккумулятора 7Д-0,1 с зарядным устройством позволяет использовать индикатор без подзарядки в течение 7 ч непрерывной работы.
Правильно выполненный индикатор помогает фиксировать прилегание фотопластинки к прикладной рамке камеры со средней квадратической ошибкой mX = ±0,018 мм, mY = ±0,012 мм.
Приложение 4
РЕКОГНОСЦИРОВОЧНЫЙ ПЛАНШЕТ1
1 Разработан А.С. Кислициным.
Рекогносцировочный планшет (рис. 1) применяют при определении на местности базисных точек и границ съемки с каждого базиса.
Рис. 1
Планшет изготовляют из фанеры или дюралюминия толщиной 6-8 мм размером 200-250 мм и устанавливают в трегер от теодолита или установочную стойку (дюралевую трубку соответствующей длины и диаметра).
На планшете укреплены съемные визирные целики для ориентирования планшета и определения границ съемки, винт для крепления малоформатной фотокамеры и два упора, фиксирующие камеру в положении, когда ее оптическая ось совпадает с осью, прочерченной на планшете.
При рекогносцировке на левой точке намечаемого базиса фотографирования укрепляют установочную стойку или штатив с планшетом. При помощи прикладного уровня планшет нивелируют, а затем используя визирные целики (1-2 для нормального случая или 1-3, 2-4 при равномерно отклоненной съемке), ориентируют по линии базиса, а по визирным целикам 5-6, 5-7 определяют границы съемки в горизонтальной плоскости.
Ожидаемую плановую и высотную точность в положении конкретных точек на местности (в зоне проектируемой трассы или) определяют по диаграмме ошибок, укрепленной на планшете (рис. 2).
Эту диаграмму строят на основании теории ошибок фототеодолитной съемки.
Рис. 2
Для нормального случая съемки точность получения пространственных координат точек оценивают по следующим формулам:
 (1)
(1)
Отбросим слагаемые, содержащие ошибку μb на том основании, что базис фотографирования, как правило, измеряется с избыточной точностью. Заметим, что ошибка μb действует на Y сильнее, чем на X, Z.
В формулу (b) введем
слагаемое  по следующим причинам: главное расстояние фотокамеры f определяется с высокой точностью, но в процессе работы оно изменяется, что может быть учтено измерением соответствующих
величин негатива на стереокомпараторе. Величина f определится при этом с ошибкой измерения
на стереокомпараторе. Новый член формулы компенсирует также
влияние слагаемого, содержащего ошибку μb.
по следующим причинам: главное расстояние фотокамеры f определяется с высокой точностью, но в процессе работы оно изменяется, что может быть учтено измерением соответствующих
величин негатива на стереокомпараторе. Величина f определится при этом с ошибкой измерения
на стереокомпараторе. Новый член формулы компенсирует также
влияние слагаемого, содержащего ошибку μb.
Заметив, что ![]() - знаменатель
масштаба изображения, введя коэффициенты:
- знаменатель
масштаба изображения, введя коэффициенты: ![]() ;
; ![]() ;
; ![]() и приняв
и приняв
μp = μf = μx1 = μz1 = μ,
после несложных преобразований получим:
Во все выражения ошибок множителями входит масштаб изображения в точке. В каждом присутствует множитель, показывающий, во сколько раз соответствующая координата больше базиса. Именно потому ошибки MY всегда более MX и MZ, так как Y всегда превосходит X и Z.
По физическому смыслу коэффициент QY является характеристикой параллактического угла на данной точке при данной величине базиса.
По величине QY близко к котангенсу параллактического угла, а точнее ![]() .
.
Аналогично QX и QY близки к котангенсам воображаемых параллактических углов, которые получились бы при рассматривании базисов расстояний, равных абсциссе и аппликате точки.
Величины Q удобно считать координатами в системе, когда за единицу измерения принят базис. Назовем их приведенными (масштабированными) координатами.
Из формул (2) видно, что приведенные координаты определяют в основном ошибку пространственного положения точек.
Построив график линий MX = a; MY = b; MZ = c, получим диаграмму ошибок (см. рис. 2).
Диаграмма пригодна для любого базиса, если учесть коэффициенты перехода от координат X, Y, Z к коэффициентам QX, QY, QZ. Она наглядно показывает распределение по площади ошибок MX и MY. Все линии MX могут служить и изолиниями MZ, так как их выражения аналогичны.
Для определения ошибок в плановом положении точек служит график
![]() .
.
На рис. 2 линии равных значений Ms проведены штрихами.
Ожидаемые ошибки определяют после ориентирования планшета на левой точке базиса фотографирования.
Определив примерное расстояние от точки стояния до определяемой точки, откладывают его на диаграмме по направлению на точку в масштабе диаграммы; определяют значения QY и QX и, задавшись базисом, ожидаемые ошибки.
Чтобы обеспечить заданную точность определения точек, на нужных направлениях находят точки с требуемой Ms и определяют для них QX и QY. Затем приближенно (по карте или по аэроснимкам) определяют расстояние до точек и вычисляют минимальную длину базиса фотографирования. Если такой базис на местности выбрать невозможно, что случается в горных условиях, то, кроме приближения к объекту, уменьшения ожидаемой ошибки можно добиться разворотом базиса с тем, чтобы приблизить важнейшие объекты к оси съемки.
Аналогично определяется допустимость ожидаемой ошибки MZ. Превышение объекта над горизонтальной плоскостью, проходящей через центр объектива на левой точке стояния, определяют с помощью простейших угломерных инструментов, используя расстояния, определенные по аэроснимкам или картам.
Уменьшения ошибки MZ можно достигнуть (в горной местности) переносом базиса по высоте, чтобы QZ уменьшилось по абсолютной величине.
Приложение 5
ЖУРНАЛ
|
|
Дата 21/VII 1960 г. Базис 8. Начало 10-00. Конец 11-50 Погода: ясно, слабый ветер |
Схема расположения контрольных точек и точек геодезического обоснования
ЖУРНАЛ ФОТОГРАФИРОВАНИЯ
|
Точки съемки |
A |
B |
Примечание |
||||
|
Положение оси |
AL |
A |
AR |
BL |
B |
BR |
i8A = 1,10 м i8B = 1,21 м угол скоса φ = 30° Кассета № 20 засвечена |
|
Номера снимков |
|
30,31 |
32,33 |
|
34,35 |
36,37 |
|
|
Номера кассет |
|
13,14 |
15,16 |
|
17,18 |
19,21 |
|
|
Экспозиция |
|
10,10 |
10,10 |
|
9,9 |
9,9 |
|
|
Положение объектива |
|
-40 +30 +30 -40 |
|
|
-40 +30 +30 -40 |
||
ЖУРНАЛ ИЗМЕРЕНИЯ БАЗИСОВ
|
Точки визирования |
Отсчеты по горизонтальному кругу |
δγ |
γ |
b табличное |
|
|
|
Точка 8A |
|
|
|
Левая |
188°47′1″ |
|
|
|
|
Правая |
190°48′6″ |
|
2°01′5″ |
|
|
Правая |
200°56′0″ |
12°08′9″ |
2°01′483″ |
γср = 2°01′492″ 2°01′29,5″ |
|
Левая |
0°34′3″ |
|
|
|
|
Правая |
12°43′3″ |
12°09′0″ |
2°01′500″ |
|
ЖУРНАЛ ИЗМЕРЕНИЯ НАПРАВЛЕНИЙ
|
Наименование точек наблюдения |
|
Горизонтальный круг |
Вертикальный круг |
Высота знака, м V |
Примечание |
||||
|
КП КЛ |
Го = КП - КЛ |
Средние направления |
Приведенные направления |
КП КЛ |
МО |
β |
|||
|
|
|
|
|
Станция 8A |
|
|
|
|
|
|
т. УН |
0°00 0″ 0,6 |
-0,6 |
0°00 3″ |
0°00 0″ |
93° 22 6″ 266°38 3″ |
+0,45 |
-3°23 05″ |
1,90 |
|
|
КП-19 |
73°10 2″ 10,8 |
-0,6 |
73°10 5″ |
73°10 2″ |
104°21 2″ 255°39 4″ |
+0,30 |
-14°21 5″ |
0 |
Наблюдалось перекрещивание вехи |
|
|
90°08 6″ 90 |
-0,4 |
90°08 8″ |
90°08 5″ |
92°27 0″ 267°33 9″ |
+0,45 |
-2°27 55″ |
1,45 |
|
|
т. Х |
103°46 3″ 47,0 |
-0,7 |
103°46 7″ |
103°46 4″ |
76°15 1″ 283°45 6″ |
+0,35 |
+13°45 25″ |
1,90 |
|
|
Куст |
285°34 8″ 35,4 |
-0,6 |
285°35 1″ |
285°34 8″ |
74°27 8″ 285°33 0″ |
+0,40 |
+15°32 6″ |
- |
Наблюдалась вершина куста |
|
т. УП |
0°00 0″ 0,6 |
-0,6 |
0°00 35″ |
0°00 0″ |
|
|
|
|
|
Приложение 6
ЖУРНАЛ ПОЛЕВОЙ ОЦЕНКИ КАЧЕСТВА НЕГАТИВОВ
|
№ базисов и дата съемки |
№ снимков |
Наружные дефекты и фотокачество |
Отклонение от эталона |
Общая оценка |
Примечание |
|
8 21/VII-60 |
A - 30 |
Хорошо |
0,05 |
+ |
|
|
A - 31 |
Хорошо |
0,05 |
+ |
Переснять |
|
|
B - 34 |
Хорошо |
0,0 |
+ |
|
|
|
B - 35 |
Хорошо |
0,2 |
- |
Переснять |
|
|
A - 32 |
Удовлетворительно |
0,0 |
+ |
|
|
|
A - 33 |
Хорошо |
0,05 |
+ |
|
|
|
B - 36 |
Удовлетворительно |
0,0 |
+ |
|
|
|
B - 37 |
Удовлетворительно |
0,05 |
- |
|
Приложение 7
ЖУРНАЛ АНАЛИЗА НЕГАТИВОВ
|
№ координат меток |
Отсчеты x, мм |
Отсчеты Z, мм |
LZ = x2 - x1 Lb = z3 - z4 |
ΔLг ΔLb |
l1 l2 l3 l4 |
Δl |
Формулы |
|
|
|
|
Снимок A30 |
|
|
|
|
|
1 |
30,46 |
|
|
|
|
|
L0г = 161,91 L0b = 114,07 l01 = 80,85 l02 = 81,03 l03 = 57,02 l04 = 57,05
δf = K1ΔL2 = +0,18 x0 = K2(Δl1 + Δl2) = -0,14 z0 = K3(Δl4 - Δl3) = -0,12 |
|
|
|
161,93 |
+0,02 |
|
|
||
|
2 |
192,38 |
|
|
|
|
|
|
|
3 |
|
465,92 |
|
|
|
|
|
|
|
|
114,08 |
+0,01 |
|
|
||
|
4 |
|
351,84 |
|
|
|
|
|
|
|
|
|
Снимок B37 |
|
|
|
|
|
1 |
31,34 |
408,53 |
|
|
80,98 |
+0,10 |
|
|
2 |
198,40 |
408,53 |
162,06 |
+0,15 |
81,08 |
+0,05 |
|
|
3 |
112,32 |
465,60 |
|
|
57,06 |
+0,04 |
|
|
|
|
|
114,14 |
+0,10 |
|
|
|
|
4 |
112,32 |
351,46 |
|
|
57,07 |
+0,02 |
Приложение 8
ВЕДОМОСТИ ДЕШИФРИРОВАНИЯ
|
№ базисов и снимков |
№ контуров |
Содержание контура |
Примечание |
|
8 А-31 |
1 |
Выход грунтовых вод |
|
|
2 |
Развалины каменного строения |
|
|
|
3 |
Яма с водой |
|
|
|
4 |
Родник |
Не изобразился, получен линейными засечками |
|
|
5 |
|
||
|
6 |
|
ВЕДОМОСТЬ ИНЖЕНЕРНОГО ДЕШИФРИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ И ПРОМЫШЛЕННЫХ ПЛОЩАДОК
|
№ базисов и снимков |
№ контуров |
Содержание контура |
Примечание |
|
Базис 17-21 |
1 |
Здание диспетчерского пункта, кирпичное, шиф., 2 этажа, хорошее |
Габариты определяются по углам здания |
|
А-17 |
2 |
Математический центр СП-18, тяга ручная, цельнолитая крестовина, правосторонний, рельс тип Р-43, балласт |
Обмер и определение координат ЦСП производится графо-аналитическим способом |
Приложение 9
ВЕДОМОСТИ ГЕОДЕЗИЧЕСКИХ КООРДИНАТ ОПОРНОЙ СЕТИ, БАЗИСНЫХ И КОНТРОЛЬНЫХ ПУНКТОВ
|
Наименование точек |
Координаты, м |
Примечание |
||
|
X |
Y |
H |
||
|
|
Точки магистрального хода |
|
||
|
ПК 10 |
130,60 |
846,07 |
325,47 |
|
|
ПК 30÷75 |
|
|
|
|
|
|
Опорные точки |
|
||
|
ОП-10 |
151,80 |
1010,08 |
321,32 |
Замаркирован на местности |
|
ОП-11 |
|
|
|
Телевизионная антенна на крыше здания Предельный столбик |
|
ОП-12 |
|
|
|
|
|
|
Контрольные пункты |
|
||
|
КП-19 |
|
|
|
Крест на скале |
|
КП-20 |
|
|
|
Обоснование столба |
ВЕДОМОСТЬ ДИРЕКЦИОННЫХ УГЛОВ БАЗИСНЫХ И КОНТРОЛЬНЫХ НАПРАВЛЕНИЙ
|
Наименование точек |
Приведенные горизонтальные направления |
Дирекционные углы |
Вертикальные углы |
|
|
Станция 8A |
|
|
|
Т. VII |
0 00 00 |
24 38 15 |
-3 21 63 |
|
КП-19 |
73 10 12 |
97 48 27 |
-14 21 39 |
|
Скала |
78 36 18 |
103 14 38 |
+14 26 18 |
|
Т. X |
84 08 96 |
108 46 51 |
+13 45 15 |
|
8B |
103 46 24 |
128 24 39 |
-2 27 57 |
|
Куст |
285 34 48 |
310 13 09 |
+15 32 30 |
|
|
Станция 8B |
|
|
|
Т. X |
0 00 00 |
97 14 15 |
|
|
Камень |
.... |
|
|
|
.... |
|
|
|
|
8A |
211 10 29 |
308 24 44 |
|
Приложение 10
ВЕДОМОСТИ КОНТРОЛЯ УГЛОВЫХ ЭЛЕМЕНТОВ ВНЕШНЕГО ОРИЕНТИРОВАНИЯ
Измерение координат точек контрольных направлений
|
№ точек |
Отсчеты по шкалам |
Координаты точек на снимках |
Разности измеренных и вычисленных координат |
|||||||||
|
x′ |
z′ |
p |
q1 |
x1 |
z1 |
x2 |
z2 |
Δx1 |
Δz1 |
Δx2 |
Δz2 |
|
|
|
|
Стереопара 30 A - 34 B (базис № 8) |
M0X = 100,00 |
M0Z = 100,00 |
|
|
||||||
|
КП-19 |
35,00 |
347,50 |
|
|
-65,00 |
-52,50 |
|
|
-0,02 |
+0,03 |
|
|
|
т. VII |
104,32 |
388,50 |
|
|
+4,32 |
-11,50 |
|
|
-0,03 |
+0,02 |
|
|
|
Пик скалы |
151,91 |
449,36 |
|
|
+51,91 |
+49,36 |
|
|
-0,04 |
+0,03 |
|
|
|
|
|
|
|
|
|
|
Средн. |
-0,03 |
+0,03 |
|
|
|
Вычисление координат точек снимка по измеренным углам
f = 194,68
|
№ точек |
Горизонтальный угол от нормали к базису |
Доправка за центрировку |
d′ |
tgα |
x = ftgα |
β |
tgβ |
|
|
КП-19 |
-18 27 15 |
15″ |
-18 27 30 |
0,333790 |
-64 98 |
-14 21 30 |
-0,255985 |
-52 53 |
|
т. VII |
+1 16 36 |
10″ |
+1 16 46 |
0,022332 |
+4 35 |
-3 23 03 |
-0,059134 |
+11 52 |
|
Пик скалы |
+14 56 12 |
15″ |
+14 56 27 |
0,266839 |
+51,95 |
+13 45 27 |
+0,244839 |
+49 32 |
Приложение 11
СТЕРЕОКОМПАРАТОР СТЕКО
Наиболее распространенный в настоящее время стереокомпаратор стеко Народного предприятия К. Цейс, Иена (ГДР) позволяет измерить координаты x, z, продольный и поперечный параллаксы p и q сфотографированных точек местности.
Стереокомпаратор предназначен для измерений снимков размеров до 13×18 (негативов, диапозитивов и контактных отпечатков).
Негативы и диапозитивы освещаются верхними, а контактные отпечатки - нижними лампами.
Общая каретка перемещается левым штурвалом. Подвижная часть бинокулярного микроскопа передвигается средним штурвалом, перпендикулярно направляющим общей каретки.
Смещения общей каретки и подвижной части бинокулярного микроскопа, соответствующие координатам точки левого снимка, учитываются по счетчикам, цена деления которых составляет 0,02 мм, а точность отсчета ±0,01 мм. На время установки по барабанам нужных отсчетов штурвалы отключают.
Левую каретку со снимкодержателем можно смещать относительно общей каретки вправо на 37 мм и влево на 19 мм от начального положения и закреплять в нужном положении.
Правая каретка со снимкодержателем перемещается правым штурвалом параллельно направляющим общей каретки. Это движение, соответствующее горизонтальному параллаксу, учитывается счетчиком, цена деления которого 0,005 мм, а точность отсчета ±0,001 мм.
Для измерения вертикальных параллаксов правая подвижная часть бинокулярного микроскопа перемещается при помощи шайбы относительно левой подвижной части вдоль оси Z прибора. Вертикальный параллакс отсчитывается по счетчику, имеющему цену деления 0,01 мм и точность отсчета ±0,002 мм.
Увеличение наблюдательной системы 8×. Расстояние между окулярами можно изменять в пределах от 54 до 76 мм. Фокусировка по глазу допускается в пределах ±5 диоптрий.
Резкость изображения снимка достигается вращением кольца подвижного объектива, доступ к которому осуществляется через отверстие в передней части прибора. На правой стороне прибора крепится чертежный столик.
Лампы освещения питаются напряжением 220 В. При транспортировке отключают ведущие ролики, закрепляющие общую каретку.
Для получения правильных значений координат стереокомпаратор должен отвечать следующим условиям.
1. Бинокулярная система должна обеспечивать резкое изображение на обоих снимках без зрительного параллакса.
2. Перемещение основной каретки, оптической системы и правой каретки в направляющих должно быть прямолинейным.
3. Основные оси прибора x-x и z-z (y-y) должны быть взаимно перпендикулярны.
4. Направление перемещений правой каретки по осям x-x и z-z (y-y) должно быть параллельно соответствующим осям основной каретки.
5. Параллактические винты p и q не должны иметь люфтов.
Для проверки условий правильной работы в стереокомпаратор закладывают контрольные сетки.
Непрямолинейность основных направляющих и их неперпендикулярность, параллельность движения правой каретки и величины люфтов параллактических винтов не должны превышать 0,002 мм.
Измерения снимков в стереокомпараторе производят известными способами. При измерениях снимков, полученных с вертикального базиса фотографирования, их закладывают с разворотом изображения на 90°.
Ориентирование и измерение снимков
Для измерения снимков в стереокомпараторе негативы укладывают в кассеты эмульсией вниз примерно на середину кассеты и закрепляют зажимами.
Ориентирование снимков состоит в том, чтобы координатные оси снимков (xx и zz), определяемые центрами координатных точек, расположить параллельно соответствующим осям стереокомпаратора. Точное ориентирование снимков по оси XX достигают методом последовательных приближений. Для этого правую координатную метку левого снимка движениями x и z точно совмещают с измерительной маркой, а правую марку движениями p и q - с центром метки правого снимка.
После этого перемещают общую каретку влево движениями x, и наблюдаемое вертикальное отклонение марок относительно меток устраняется наполовину вращением кассет в своей плоскости по x, а наполовину движением z (для левого снимка) и движением q (для правого снимка). Эту операцию повторяют до тех пор, пока марки при перемещении каретки прибора по оси xx не будут отклоняться от координатных меток более чем на 0,02 мм.
Измерение координат наблюдаемых точек на стереокомпараторе выполняется следующим образом.
Движениям штурвалов x и z марки переводят в зону, где располагается измеряемая точка, а движениями (p) и, если необходимо, (q) вначале монокулярно, а затем стереоскопически добиваются получения пространственного восприятия модели (стереоэффект). Левую марку наводят на изображение измеряемой точки и совместными движениями p и q добиваются уничтожения поперечного параллакса. Затем, продолжая наблюдать стереоскопически, незначительным поворотом винта продольных параллаксов (p) «поднимают» марку над моделью и совмещают ее с поверхностью модели в наблюдаемой точке; записывают отсчет (p) и аналогичным образом повторно совмещают марку с моделью. Расхождение между отсчетами не должно превышать 0,02 мм, за окончательное значение берется среднее. Затем снимают отсчеты по шкалам x и z, а если необходимо, и q.
Приложение 12
СТЕРЕОАВТОГРАФ 1318
Принципиальная схема
Стереоавтограф предназначен для составления планов графо-механическим способом; он представляет собой соединение стереокомпаратора с системой линеек, позволяющих механически решать прямую засечку.
Решение прямой засечки в плоскости XV осуществляется при помощи линейки направлений L и линейки параллаксов p (рис. 1), вращающихся вокруг точек S1 и S2, соответствующих центрам проектирования. Линейки L и p специальными тягами связаны соответственно с левым и правым списками, причем расстояния точек присоединения тяг от точек S1 и S2 могут быть сделаны равными фокусному расстоянию съемочной камеры (f). В положении, когда линейки параллельны друг другу и перпендикулярны направлению S1 и S2 (базису), марки должны быть совмещены с главными точками снимков. Если теперь навести марку стереокомпаратора и связанные с нею концы линеек на изображение точки M (m1 и m2 на снимках), то пересечение линеек L и p определит плановое положение точки M в масштабе L. Если расстояние между точками S1 и S2 будет равно
![]() ,
,
где B - значение базиса фотографирования,
то положение точки M получим на планшете в масштабе плана t.
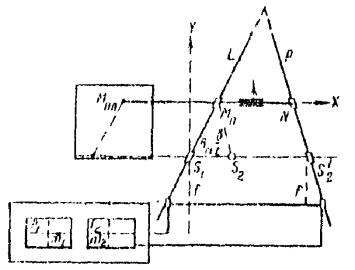
Рис. 1
Конструктивное плановое положение точек определяется с помощью мостика и каретки отстояний, имеющей ролики M0 и N, по которым перемещаются линейки L и p.
Каретка отстояний может перемещаться по направляющим x-x мостика отстояний, который в связи с чертежным устройством для фиксирования точки Mпл на планшете.
Таким образом осуществляется засечка в плоскости X-Y для нормального случая съемки.
Для решения задачи в случае равноотклоненных осей правый ролик N может перемещаться в базисных направляющих относительно левого, что соответствует разложению базиса по осям X и Y (BX и BY). При этом, если угол скоса осей равен φ, то
BX = Bcosφ и BY = Bsinφ,
где B - базис фотографирования в масштабе съемки.
Для определения высот наблюдаемых точек стереоавтограф снабжен устройством, состоящим из двух жестко скрепленных под прямым углом линеек f и H (рис. 2), вращающихся вокруг точки S′1, соответствующей левому центру проектирования.
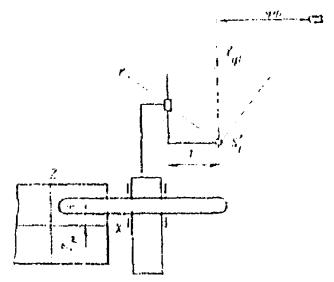
Рис. 2
Короткая линейка с помощью
каретки фокусных расстояний жестко связывается с бинокулярной системой; ее
длина может устанавливаться на заданное фокусное расстояние. Свободный конец
большой линейки лежит на каретке высот мостика отстояний. При перемещении
бинокулярной системы на величину, равную Z, ведущий ролик каретки высот переместится по мостику отстояний на
величину ![]() , т.е. определит превышение наблюдаемой точки над центром
проекции левого снимка в масштабе модели.
, т.е. определит превышение наблюдаемой точки над центром
проекции левого снимка в масштабе модели.
Краткое описание
Стереоавтограф 1318 состоит из мостика микроскопов, системы линеек и мостика отстояний.
Стереоавтограф снабжен координатографом с различными передаточными соотношениями - 0,5; 1,0 и 2,0. На массивной станине укреплены главные направляющие мостика отстояний и цилиндрическая направляющая, по которой перемещаются каретки со снимками. На мостике микроскопов и линеек размещены два отсчетных микроскопа, бинокулярный микроскоп для наблюдения снимков и четыре развертывающих линейки - линейки направлений L и параллаксов p и две линейки высот H, H′. Оси вращения плановых линеек (L и p) расположены под мостиком микроскопов, а ось вращения высотных линеек - на дополнительной плите. Стереокомпаратор с системой развертывающих линеек установлен на массивной станине.
Каретки снимков стереокомпаратора с помощью специальных тяг, которые в случае необходимости можно отключать, связаны через каретки фокусных расстояний с основными линейками L и p.
Правая линейка p имеет корректор конвергенции γ, при помощи которого короткое плечо линейки поворачивается относительно длинного вокруг точки правого центра проектирования S2 винтом. Угол конвергенции отсчитывается.
Расстояния от точек вращения линеек S1 и S2 до ведущих роликов каретки фокусных расстояний могут изменяться от 157 до 198 мм и отсчитываются по индикаторам.
Мостик отстояний МО перемещается по направляющим Y-Y, а каретка отстояний КО с помещенными в ней длинными концами линеек L и p - по оси в направляющих мостика отстояний.
Ведущий ролик правой линейки может перемещаться относительно ведущего ролика левой линейки в направлении X и Y с помощью винтов. Это перемещение, соответствующее разложению базиса на составляющие bX и bY, отсчитывается с помощью индикаторов. Каретки левого и правого снимков связанны также с высотными линейками, короткие плечи которых находятся в каретках фокусных расстояний. Значение фокусного расстояния может быть установлено с помощью индикаторов.
Длинные концы высотных линеек лежат на каретке высот, перемещающейся в направляющих мостика отстояний по оси X-X. Основной является левая высотная линейка; правая линейка высот служит только для того, чтобы при наблюдениях вводить поправки за поперечный параллакс из-за разности высот левого и правого центров фотографирования. Для этого ведущий ролик правой линейки высот перемещается относительно начального положения (левого ролика) на величины BY и BZ (проекция базиса фотографирования на оси Y и Z).
Мостик отстояний при помощи штурвала Y перемещается по основным направляющим, прикрепленным к станине. На нем имеются нижние и верхние направляющие. По нижним направляющим штурвалом X перемещается каретка отстояний, а верхние служат для перемещения каретки высот ножным диском Z. Приводы штурвалов X и Y снабжены переключателями скорости движений (для ориентирования и обработки снимков) и счетчиками с ценой деления - 0,1 мм.
Счетчик высот позволяет отсчитывать высоты наблюдаемых точек (в м): при масштабах 1:800, 1:2000, 1:4000 - по красным, а 1:1000, 1:2500, 1:5000 - по белым цифрам.
Объективы наблюдательных микроскопов могут перемещаться по оси Z в положения, соответствующие смещению объективов съемочной камеры. В фокальной плоскости каждого микроскопа наблюдательной системы введены световые марки. Установку глазного базиса и фокусировку выполняют обычным путем.
Снимки или юстировочные сетки устанавливают на каретках с помощью центрирующих штифтов. Центрировку снимков в снимкодержателе выполняют на световом пульте с помощью накладного микроскопа.
Техническая характеристика
Фокусное расстояние прибора........................................................................... 157 - 198 мм
Перемещение объективов наблюдательной системы (смещение горизонта) +30 - 45 мм
Конвергенция правой линейки................................................................................... +5q - 2q
Базисные составляющие, мм:
bX.................................................................................................................................. 0 - 60
bY................................................................................................................................ +3 - 20
bZ.............................................................................................................................. +10 - 10
Пределы координатных движений, мм:
X.......................................................................................................................... -220 - +220
Y........................................................................................................................... +50 - +400
Z.......................................................................................................................... -235 - +235
Поверки*
* Фототеодолитная съемка в крупных масштабах. ВНИМИ, 1960.
Перед юстировкой станина прибора должна быть приведена в горизонтальное положение. Это выполняется путем последовательной установки накладного уровня на цилиндрическую направляющую кареток снимкодержателей и по направляющую каретки отстояний; пузырек уровня выводится на середину с помощью подъемных винтов на станинах прибора.
Далее на отсчетных устройствах базисных составляющих bX; bY; bZ конвергенции γ и смещения объективов устанавливают отсчеты, равные нулю, а на индикаторах фокусных расстояний - наибольшие и равные друг другу отсчеты.
Конвергенция правой плановой линейки
В исходном положении (γ = 0) направляющие ребра предметного и картинного плеч правой плановой линейки должны лежать на одной прямой. Проверка этого условия выполняется в следующем порядке.
1. Счетчик координат Y устанавливают в такое положение, при котором отсчеты по нему будут примерно соответствовать действительному расстоянию Y. Для этого вращением штурвала совмещают белый штрих, нанесенный на каретке отстояний, с краем мостика линеек и устанавливают на счетчике отсчет 200,00 мм.
2. Маркируют кружками или точками центры контрольных сеток и устанавливают сетки на каретки снимков.
3. Мостик отстояний ставят в такое положение, чтобы отсчет по счетчику Y был целым числом, близким к наибольшей величине Y, например 400 мм.
4. Правую измерительную марку устанавливают на крайний (восьмой сантиметровый) штрих сетки вправо от центра и берут отсчет X1 по счетчику X.
5. Правую измерительную марку устанавливают на центральный крест сетки и берут отсчет X0. Правую измерительную марку устанавливают на восьмой сантиметровый вертикальный штрих сетки влево от центра и берут отсчет X2.
6. Вычисляют разности X1 - X0 = XR; X0 - X = XL и величину конвергенции по формуле
![]() .
.
Угол α определяют из соотношения
![]()
Пример. Для величины γ = 400 мм и f = 198 мм конвергенция составит
γ = (XR - Xi)26′,
если разность будет вычисляться в мм. Если, например
XR - XL = 0,04 мм, то γ ≈ 1′.
7. Исправляют положение нульпункта отсчетного барабана конвергентного устройства. Для этого отпускают зажимные винты отсчетного барабана и поворачивают его до тех пор, пока отсчет по нему не станет равен вычисленному значению; после этого барабан закрепляют.
8. Ослабив зажимной винт, устанавливают барабан в положение γ = 0 и для контроля правильности юстировки все операции повторяют.
Измерительные марки
Чтобы определить, требуется ли юстировка положения измерительных марок, устанавливают каретку отстояний в крайнее дальнее положение и совмещают левую измерительную марку с центром контрольной сетки. Затем каретку приближают до отстояния 70-100 мм и вновь наблюдают марку. Если марка отошла от центра сетки более чем на четверть своего диаметра, необходимо произвести юстировку.
Юстировку каждой измерительной марки рекомендуется выполнять в два этапа: вначале устранить смещение марки по горизонтали, затем - по вертикали.
Устранение смещения левой марки по горизонтали производят в следующем порядке.
1. Устанавливают мостик отстояний в дальнее положение (отсчет Y1 = 400 мм).
2. Измерительную марку штурвалами X и Z совмещают с центральным (нулевым) вертикальным штрихом контрольной сетки (точка 1, рис. 3) вблизи центрального перекрестия и закрепляют стопор штурвала X.
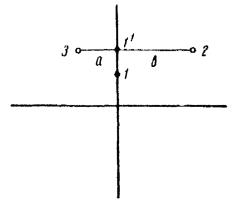
Рис. 3
3. Штурвалом Y каретку отстояний ставят в ближнее положение (отсчет Yг = 100 мм); при этом марка сместится с нулевого штриха и займет положение 2.
4. Штурвалом X (после открепления стопорного винта) перемещают марку в направлении, противоположном видимому смещению, в положение 3 так, чтобы ее смещение относительно нулевого штриха сетки было равно
![]() ,
,
где b - видимое смещение марки в положение 2;
ΔY = (Y1 - Y2).
Величина d оценивается на глаз в долях смещения b. Например:
если Y1 в 400 мм, Y2 = 100
мм, то ![]() .
.
5. Затем юстировочным винтом измерительную марку вновь совмещают с нулевым вертикальным штрихом сетки (положение 1° на рис. 5). Если теперь возвратить каретку отстояний в дальнее положение (отсчет Y1), то измерительная марка не должна сойти с нулевого штриха сетки. В случае небольшого остаточного смещения юстировку следует повторить.
Так выполняют юстировку марки по вертикали; при этом ее совмещают с нулевым горизонтальный штрихом, а поправляют соответствующим юстировочным винтом.
Закончив исправление, марку совмещают с центральным крестом сетки и перемещают каретку отстояний штурвалом Y по всему диапазону перемещения (от Y1 до Y2). При правильно выполненной юстировке марка не должна смещается с центрального креста сетки.
Аналогично юстируется правая марка.
Индикаторы фокусных расстояний
Индикаторы установки фокусных расстояний для всех четырех линеек юстируются одним и тем же способом. Для индикаторов плановых линеек из рис. 4
![]() . (1)
. (1)
Для фокусных расстояний высотных линеек по аналогии
![]() . (2)
. (2)
Для повышения точности определений отрезки сетки ΔX или ΔZ и разности отстояний ΔY следует выбирать по возможности большими.
Рис. 4
Юстировку индикаторов плановых линеек производят в следующем порядке:
- устанавливают каретку отстояний в дальнее положение (отсчет Y1 = 400 мм);
- наводят марку на крайний правый штрих сетки (x1) и берут отсчет X1 по счетчику X;
- наводят марку на левый крайний штрих сетки (x2) и берут отсчет X2;
- перемещают каретку отстояний в ближнее положение (отсчет Y2 = 100 мм);
- устанавливают марку на правый штрих сетки (x1) и берут отсчет X3;
- устанавливают марку на левый штрих сетки (x2) и берут отсчет X4;
- вычисляют разности ΔY = Y1 - Y2; ΔX1 = X1 - X2; ΔX2 = X3 - X4; ΔX = ΔX1 - ΔX2 и Δx = x1 - x2;
- вычисляют фокусное расстояние f;
- устанавливают индикатор на вычисленное значение f.
Вид индикатора показан на рис. 5. Устанавливают его на вычисленное значение f вращение кольца с накаткой 3. Для этого ослабляют (вращение влево) кольцо с накаткой 2 и, вращая кольцо 3, устанавливают на индикаторе вычисленное значение f, после чего вновь закрепляют кольцо 2.
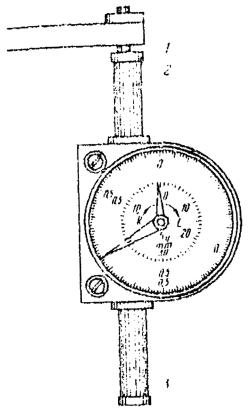
Рис. 5
Юстировка индикаторов высотных линеек отличается только тем, что установки производят соответственно по крайнему верхнему Z1 и крайнему нижнему Z2 штрихам сетки, а отсчеты Z1, Z2, Z3 и Z4 берут по счетчику высот при установке на масштаб 1:1000 (цена деления счетчика 0,1 мм).
Пример юстировки индикаторов
Дальнее положение
y1 = 400,00 мм X1 = 656,87 мм
x1 = +80,00 мм X2 = 333,50 мм
x2 = -80,00 мм ΔX1 = 323,37 мм
Ближнее положение
Y2 =100,00 мм X3 = 535,69 мм
x1 = +80,00 мм X4 = 454,73 мм
x2 = -80,00 мм ΔX2 = 80,96 мм
ΔY = 300,00 мм
ΔX = 242,41 мм
Δx = 160,00 мм
f = 198,01 мм
Такие измерения с последующим вычислением фокусных расстояний производят для каждой линейки, после чего на всех индикаторах устанавливают одинаковое значение f, близкое к максимальному (например, 198,00 мм).
Индикаторы базисных составляющих bX и bY
Отсчеты по индикаторам базисных составляющих должны быть равны нулю, после того как плановые, а также высотные линейки установлены параллельно друг другу (при наведении марок на центральные кресты сеток). Юстировку производят в следующем порядке.
1. Смещают каретку отстояний в ближнее положение
Y = 100, мм.
2. Устанавливают измерительную марку на центральный штрих сетки.
3. Вращают маховичок bX до тех пор, пока правая измерительная марка не совместится со средним вертикальным штрихом юстировочной сетки.
4. Устанавливают индикатор на отсчет bX = 0,00 мм. Установка выполняется так же, как и на индикаторах фокусных расстояний.
5. Проверяют юстировку; для этого каретку отстояний перемещают на весь диапазон до Ymax. При этом ни одна из двух измерительных марок не должна смещаться по направлению X.
Юстировку индикатора bZ производят таким же образом. При этом измерительные марки совмещают с центральным горизонтальным штрихом сетки, а на индикаторе устанавливают отсчет bZ = 0,00 м.
Индикаторы базисной составляющей bY
При установках базисных составляющих bX = bY = bZ = 0 линейки в любом положении должны быть параллельны друг другу, а расстояния между точками вращения линеек и теми точками, в которых линейки соприкасаются с роликами каретки X или Z, равны друг другу и совпадать с показаниями счетчика Y.
Согласно рис. 6, для плановых линеек в дальнем положении (отсчет Y1) получим:
![]() .
.
Аналогично для высотных линеек
![]() .
.
Юстировка считается выполненной правильно, если вычисленные по формулам (3) и (4) расстояния Y1 для всех четырех линеек равны и совпадают с отсчетом Y. Юстировку выполняют следующим образом.
1. Используя данные, полученные при юстировке индикаторов фокусных расстояний по формулам (3) и (4), вычисляют Y1 для всех четырех линеек.
2. Определяет разности величин Y1, правой и левой линеек (плановых и высотных)
Y1п - Y1л = d.
3. Полученные значения d устанавливают на соответствующих индикаторах bY (положительные - по шкале скоса вправо, отрицательные - по шкале скоса влево). Затем, не изменяя базисных установок, ставят на индикаторах bY нулевые отсчеты (аналогично описанному ранее).
4. Не меняя установки каретки отстояний, закрепляют штурвал и устанавливают счетчик на среднюю величину из определений по левым плановой и высотной линейкам.
Правильность юстировки проверяют повторением описанных операций.
По окончании юстировки производят общий контроль работы прибора путем наблюдения контрольных сеток. При этом базисные составляющие и конвергенцию устанавливают на нулевые отсчеты, а на индикаторах всех четырех линеек ставят одинаковое фокусное расстояние. Если теперь на левой сетке пройти маркой по прямоугольнику, углы которого имеют координаты:
x1 = +80 мм; z1 = -80 мм; x2 = +80 мм; z2 = +60 мм;
x3 = +80 мм; z3 = -60 мм; x4 = -80 мм; z4 = -60 мм,
то на правой сетке светящаяся марка должна совмещаться с идентичными точками. Это относится также и ко всем остальным точкам сетки при любом положении каретки отстояний. Поэтому указанный контроль следует произвести как в ближнем, так и в дальнем положениях каретки.
Приложение 13
ЖУРНАЛ
ОБРАБОТКИ СНИМКОВ НА СТЕРЕОАВТОГРАФЕ
|
Базис № 8 Элементы внешнего ориентирования Стереопара 30А - 32В Длина базиса B = 74,54 Превышение H = 7,85 Угол скоса φ = 0°00 |
Установочные элементы
fл = 194,74 fп = 194,74 γ = 0 Δz = +10 |
Ориентирование модели в плане
|
№ пп |
Обозначения действий |
Значение величин |
Примечание |
|
1 |
Y′1 |
361,4 |
|
|
2 |
ΔY′1 |
+0,5 м |
|
|
3 |
Y1 |
361,6 |
|
|
4 |
ΔY1 |
+0,2 |
|
|
5 |
ΔY2 |
+0,1 -0,2 |
|
|
6 |
ΔY3 |
-0,3 -0,2 |
|
|
7 |
ΔY1 |
-0,1 |
|
|
8 |
ΔY2 |
-0,4 |
|
|
9 |
ΔY3 |
-0,3 -0,27 |
Ориентирование модели по высоте
|
Обозначения точек |
Отметки |
ΔAм |
|
|
геодезические |
фотограмметрические |
||
|
Δ1 |
856,2 |
857,0 |
-0,8 |
|
Δ1 |
856,1 |
856,1 |
+0,1 |
|
Δ |
912,4 |
912,5 |
-0,1 |
|
Δ |
923,7 |
923,5 |
+0,2 |
Приложение 14
МЕТОДИКА АНАЛИТИЧЕСКОГО СГУЩЕНИЯ ОПОРНОЙ СЕТИ ПРИ СТЕРЕОФОТОСЪЕМКЕ ПРОТЯЖЕННЫХ КОСОГОРОВ
I. Исходные данные
1. Измеренные в поле базисы фотографирования b1, b2, ..., bn и значения их дирекционных углов в фотограмметрической системе координат d1, d2, ..., dn.
2. Контрольные направления, измеренные теодолитом на каждой съемочной ситуации.
3. Отсчеты по шкалам стереокомпаратора при измерении координатных меток и связующих, опорных и определяемых точек снимков Xi, Zi, pi, qi.
4. Геодезические координаты опорных точек и приближенный угол поворота между фотограмметрической и геодезической системами координат Δx0 (см. рис. 10 настоящих Указаний).
II. Обработка одиночных фотограмметрических моделей
1. Вычисление плоских координат измеренных точек снимков:
а) находят места нулей параллактических шкал стереокомпаратора по отсчетам на координатные метки:
MOp = 0,25(pл + pп + pв + pн);
MOq = 0,25(qл + qп + qв + qн),
где pл, pп, pв, pн - отсчеты параллаксом при стереоскопическом наблюдении верхней, нижней, левой и правой координатных меток;
qл, qп, qв, qн - аналогичные отсчеты по шкале поперечных параллаксов;
б) вычисляют приведенные отсчеты на метки и точки правого снимка:
X′i = Xi - (pi - MOp);
Z′i = Zi - (qi - MOq);
в) находят места нулей координатных шкал и приведенных отсчетов правого снимка:
 ;
;  . (1)
. (1)
Аналогично находят места нулей приведенных отсчетов правого снимка MO′X, MO′Z по отсчетам на координатные метки правого снимка, полученным в п. б;
г) вычисляют плоские координаты измеренных точек левого и правого снимков:
xi = Xi - MOX; x′i = X′i - MO′X;
zi = Zi - MOZ; z′i = Z′i - MO′Z.
2. Определение поправок в элементы внутреннего и угловые элементы внешнего ориентирования по измеренным контрольным направлениям:
а) на каждой станции измеряют не менее четырех контрольных направлений, располагающихся, примерно, по углам рабочей площади снимка. По измеренным направлениям находят горизонтальные и вертикальные углы между контрольными точками и направлением оптической оси
d = βb - βm - φ,
где βb - направление на правую базисную точку;
βm - направление на контрольную точку снимка;
φ - заданный угол скоса.
Если измерения выполняли на правой точке фотографирования, то
d = βm - βb - φ;
б) по полученным горизонтальным и вертикальным углам вычисляют плоские координаты точек контрольных направлений:
x0i = ftgα; z0i = fsecditgvi,
где vi - измеренный вертикальный угол.
Находят разности между вычисленными и измеренными значениями координат точек
lxi = x0i - xi; lzi = z0i - zi.
Если li ≤ ±0,02 мм, то принятые элементы внутреннего и внешнего ориентирования считаются достаточно точными и дальнейших вычислений не производят;
в) поправки в принятые значения элементов внутреннего ориентирования и углового ориентирования камеры на станции находят, если l ≥ 0,02 мм. При этом составляют систему уравнений погрешностей вида:
где xi, zi - измеренные на снимке координаты точек контрольных направлений;
 - разности вычисленных и измеренных плоских координат;
- разности вычисленных и измеренных плоских координат;
δf, x0, z0 - поправки в значения фокусного расстояния и координат главной точки;
δα, δω, δx - поправки в принятые углы наклона и поворота снимка.
Систему уравнений (2) решают по способу наименьших квадратов, в результате решения находят поправки в принятые значения элементов внутреннего и внешнего ориентирования.
Для дальнейшей обработки используют исправленные значения этих элементов.
3. Вычисление пространственных фотограмметрических координат измеренных точек.
Пространственные фотограмметрические координаты связующих и опорных точек снимков находят по известным значениям базисов, их дирекционным углам и исправленным по контрольным направлениям элементам внутреннего и внешнего углового ориентирования снимков.
При этом используют формулы общего случая съемки применительно к базисной системе координат:
Здесь: Bj - значение базиса фотографирования;
αj - дирекционные угол базиса фотографирования;
X′iY′iZ′i и X″iY″iZ″i - координаты соответственной точки левого и правого снимков;
X′i = a1xi + a2f + a3zi; X″i = a′1x′i + a′2f + a′3zi;
Y′i = b1xi + b2f + b3zi; Y″i = b′1x′i + b′2f + b′3zi;
Z′i = c1xi + c2f + c3zi; Z″i = c′1x′i + c′2f + c′3zi;
a1,2,3, b1,2,3, c1,2,3, a′1,2,3, b′1,2,3, c′1,2,3 - направляющие косинусы, получаемые по исправленным углам наклона и поворота левого и правого снимков.
III. Вычисление координат опорных и связующих точек в общей системе фотограмметрических координат
В соответствии с выражениями (3) координаты точек в каждой модели получаются в общей ориентировке относительно принятого направления осей фотограмметрических координат (см. рис. 1), но с частными началами в левых центрах фотографирования.
Для получения значений координат относительно общего начала (обычно в левом центре фотографирования первой стереопары) используют координаты не менее трех общих связующих точек на перекрытии смежных моделей:
Xφij = Xij + X0j;
Yφij = Yij + Y0j;
Zφij = Zij + Z0j.
Разности начал координат получают последовательно по общим связующим точкам:
где Xij - координаты, полученные в предыдущей модели;
Xj+1 - координаты, полученные в последующей модели;
![]() - вес точки, зависящей от ее отстояния
от станции (в
сотнях м).
- вес точки, зависящей от ее отстояния
от станции (в
сотнях м).
Таким образом, последовательно находят координаты всех определяемых и опорных точек в фотограмметрической системе координат с началом в левом центре фотографирования первой модели.
Одновременно получают координаты всех левых центров фотографирования каждой модели в этой же системе координат
(X02, Y02, Z02; X03, Y03, Z03 ..., X0п, Y0п, Z0п).
IV. Геодезическое ориентирование и уравнение фотограмметрической сети
По координатам опорных точек, включенных в построение (рис. 22 Указаний) производится геодезическое ориентирование и уравнивание построенной сети. При этом геодезические координаты опорных точек записывают так, чтобы знаки приращения абсцисс в фотограмметрической системе соответствовали знакам приращения ординат геодезической системы координат. Если положительные направления координатных осей геодезической системе не совпадают с указаниями на рис. 22, то изменяют знаки геодезических координат опорных точек.
Элементы преобразования фотограмметрических координат и геодезическую систему (X0г, Y0г, Z0г, d, β, γ, t) находят путем решения системы уравнений погрешностей вида:
δX0г - Xiδα + 0 - Ziδγ + Xiδt + lxi = vxi;
δY0г - 0 - Yiδβ + Ziδγ + Yiδt + lyi = vyi; (5)
δZ0г + Xiδα + Yiδβ + 0 + Ziδt + lzi = vzi,
где Xi, Yi, Zi - фотограмметрические координаты опорных точек,
lXi = Yгi - (Xφi + Y′0);
lYi = Xгi - (Yφi + X′0);
lZi = Zгi - (Zφi + Z′0);
X′0, Y′0, Z′0 - приближенные геодезические координаты фотограмметрического начала координат (левого центр фотографирования первой модели).
Геодезические координаты всех точек опорной сети и левых центров фотографирования всех моделей находят по полученным элементам преобразований в соответствии с выражениями:
Xгi = X0 + (b1Xφi + b2Yφi + b3Zφi)(1 + δt);
Yгi = Y0 + (a1Xφi + a2Yφi + a3Zφi)(1 + δt);
Zгi = Z0 + (c1Xφi + c2Yφi + c3Zφi)(1 + δt);
X0 = X′0 + δX0; Y0 = Y′0 + δY0; Z0 = Z′0 + δZ0,
где
a1,2,3, b1,2,3, c1,2,3 - направляющие косинусы, получаемые по известным формулам по найденным поправкам.
Уравнения вида (5) решают по способу наименьших квадратов, причем для каждой опорной точки находит все уравнения по формуле
![]() ,
,
где Yi - отстояние в сотнях м, полученное при вычислении начальных фотограмметрических координат этой точки.
Для вычисления семи неизвестных элементов преобразований с оценкой точности необходимо иметь не менее четырех опорных точек, расположенных по концам съемочного участка на ближнем и дальнем планах. Для контроля правильности результатов измерений и вычислений в средине участка необходимо иметь не менее 1-2 опорных точек.
В результате вычислений находят геодезические координаты связующих точек и левых центров фотографирования каждой стереопары. Координаты связующих точек используют как контрольные при составлении топографических планов оптико-механическим путем в стереоавтографе.
V. Средние квадратические ошибки определения координат точек опорной сети при сгущении по изложенной методике для середины вида находят из выражений:
 ;
;
 ,
,
где n - число передач (число моделей).
Полагая, что ошибки в положении точек опорной сети не должно в среднем превышать 1,5m, где m - ошибка определения координат в пределах одной фотограмметрической модели, допустимое число передач n может достигать 7-8 моделей.
Приложение 15
МЕТОДИКА АНАЛИТИЧЕСКОЙ ОБРАБОТКИ МАТЕРИАЛОВ НЕОРИЕНТИРОВАННОЙ СТЕРЕОФОТОСЪЕМКИ С ИСПОЛЬЗОВАНИЕМ ЭВМ
1. Область применения
Аналитическая обработка материалов наземной стереофотосъемки производится в тех случаях, когда элементы внешнего ориентирования камеры точно установить невозможно. Например, при съемке плоских участков с высоких неустойчивых опор. В этих случаях элементы внешнего ориентирования снимков определяют приближенно, а каждая стереопара обеспечивается опорными точками, располагающимися, примерно, по углам рабочей площади. Общее число опорных точек должно быть не менее пяти на каждую пару снимков. Ориентировочные схемы расположения опорных точек приведены на рис. 6 Указаний.
II. Исходные данные
1. Отсчеты по шкалам стереокомпаратора на координатные метки, опорные и ориентирующие точки xi, yi, pi и qi.
2. Элементы внутреннего ориентирования фотокамеры
fк, x0, z0.
3. Приближенные значения ЭВО снимков.
4. Геодезические координаты опорных точек.
III. Измерение снимков и вычисление плоских координат точек
Снимки ориентируются в стереокомпараторе по координатным меткам и измеряются с получением отсчетов по шкалам Xi, Yi, pi, qi на метки, опорные, ориентирующие и определяемые точки.
Плоские координаты левого и правого снимков стереопары вычисляют по зависимостям, изложенным в приложении 17.
IV. Определение ЭВО снимков в принятой системе координат
Построение геодезической модели с определением ЭВО снимков производят путем ориентирования в принятой системе с координат левой и правой одиночных связок с одновременным учетом условий компланарности одноименных ориентирующих лучей.
При этом поправки в приближенно заданные значения ЭВО левого и правого снимков находят из решения системы уравнений погрешностей, которые для каждой опорной точки, изобразившейся на обоих снимках, имеют вид:
 (1)
(1)
Коэффициенты этих уравнений находят по измеренным плоским координатам точек снимков и приближенным ЭВО в соответствии с зависимостями (14 и 15) настоящих Указаний.
Для нахождения поправок к приближенно заданным ЭВО левого и правого снимков с оценкой точности необходимо иметь не менее четырех опорных точек на каждую стереопару.
Систему уравнений вида (1) решают по способу наименьших квадратов с переходом к матрице нормальных уравнений 12-го порядка. При этом уравнениям типа II системы придается вес Pq, равный отношению квадратов средних квадратических ошибок идентификации, измерения координат опорных точек и измерения продольных параллаксов. Принимая mp = ±10 мкм, а mx = mz = ±20-30 мкм (с учетом ошибок идентификации), получим Pq = 4-9. Вес остальных уравнений (I и III) принимается равным 1.
Задача в целом решается итеративным путем с последовательным уточнением значений неизвестных.
В результате решения находят линейные и угловые ЭВО обоих снимков стереопары в принятой системе координат.
Удобнее решать в фотограмметрической системе координат, для чего геодезические координаты опорных точек предварительно преобразовываются в эту систему. Для случая решения задачи с использованием системы координат и элементов внешнего ориентирования, принятых при воздушной стереофотосъемке, положительные направления координатных осей при съемках с высоких опор показаны на рис. 11-13 настоящих Указаний.
При использовании системы координат и элементов ориентирования, принятой в случае наземной стереофотосъемки с высоких опор, удобно использовать следующие соотношения:
а) съемки с одной опоры при вертикальном базисе фотографирования
Xφ = ±Yг; Yφ = ±Xг; Zφ = ±Zг;
б) съемка с двух опор при горизонтальном базисе фотографирования.
V. Вычисление геодезических координат определенных точек
Координаты определяемых точек находят по измеренным плоским координатам и полученным значениям ЭВО снимков в результате решения прямой фотограмметрической засечки. При этом используют формулы наземной (см. пп. 1.15-1.16 Указаний) или воздушной стереофотосъемки:
 ,
,
где
x0i, y0i - координаты точек левого снимка, трансформированные по известным формулам с использованием полученных угловых ЭВО;
p0i = x0i - x01i - продольный параллакс, а x01i - трансформированные координаты правого снимка.
Полученные таким образом координаты определяемых точек земной поверхности используют для составления крупномасштабных топографических планов пикетным способом или приводят в виде ведомости координат инженерных сооружений и других элементов исследуемого объекта.
Приложение 16
ВЕРТИКАЛЬНЫЕ ПРОЕКЦИИ РЕЛЬЕФА
1. Вертикальная проекция (рис. 1, а) изображает рельеф в заданном масштабе фронталями, получающимися при сечении рельефа плоскостями, параллельными вертикальной плоскости проекции и имеющими заданный интервал сечения.
Вертикальные проекции повышают качество изображения рельефа труднодоступных обрывных участков и заменяют или дополняют малоэффективные в этих условиях планы в горизонталях. Применение вертикальных проекций рельефа создает предпосылки для более полной замены измерений на местности камеральной обработкой топографических материалов.
Для создания вертикальных проекций рельефа наиболее эффективна фототеодолитная съемка.
Вертикальная плоскость проекции в этом случае проходит через базис фотографирования, центром проекции является центр объектива фотокамеры на левом конце базиса.
На схеме вертикальной проекции обрывного участка (рис. 1, б) интервал сечения рельефа ΔY принят равным 1 м. Чтобы на плане в горизонталях (рис. 1, а) заложения между изолиниями были не меньше, установлена высота сечения рельефа h = 5 м.
Представление о степени обобщения рельефа обрывного участка на плане в горизонталях дает рис. 1, г, где сплошной линией показан поперечный профиль по AB, составленный по плану в горизонталях, а пунктирной - построенный по вертикальной проекции.
Положение точек местности на вертикальной проекции определяется фотограмметрическими координатами X и Z (n) координата служит для построения линий равных отстояний - фронталей.
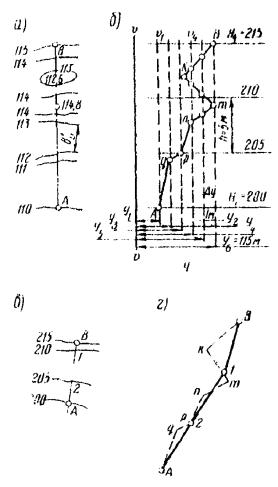
Рис. 1
2. Свойства фронталей (рис. 2) вытекают из определения фронталей как линий равных отстояний точек местности от вертикальной плоскости проекции:
а) все точки S, лежащие на одной фронтали, одинаково удалены от вертикальной плоскости проекций (Ys = 121 м);
б) все фронтали в пределах данной проекции непрерывны;
в) при правильном выборе положения базиса фотографирования фронтали не пересекаются, их пересечение говорит о том, что одна форма рельефа закрывает другую;
г) фронтали, изображающие равномерный слой (участок С), параллельны друг другу, их наклон к горизонту (угол γ) тем больше, чем больше угол β между плоскостью ската и вертикальной плоскостью проекции;
д) фронтали, замыкающиеся в пределах чертежа, обозначают или нависающий над обрывом выступ (точка N), или западающую в обрыв котловину (точка K). Выступ или впадина опознаются по отстояниям характерных точек и близлежащих фронталей;
е) V-образные фронтали обозначают лощину (линии EF и ML - оси отлогов) и, наоборот, A-образные - хребет (линии PQ - водораздельная линия, проходящая по хребту);
ж) водораздельные лини и оси лощин пересекаются фронталями под прямым углом (точка R);
з) как правило, точки, имеющие на проекции большие отстояния, имеют и большие отметки (исключение п. 5);
и) расстояния на проекции между фронталями (bv) и их ориентировка (углы γ) характеризуют крутизну ската.
При одинаковых углах γ или при γ = 0 промежутки между фронталями тем больше, чем больше угол наклона ската α, к горизонтальной плоскости проекции (участок B круче участка A);
к) оптимальной ориентировкой для вертикальной плоскости проекции (базиса фотографирования) будет та, при которой заложения между фронталями максимальны.
Рис. 2
3. При разбивке базисов фототеодолитной съемки для создания вертикальных проекций рельефа выполняются требования, изложенные выше.
При рекогносцировке по картографическим материалам мелкого масштаба плоскости проекций ориентируют так, чтобы направления простирания рельефа отдельных участков составляли с выбранным направлением возможно меньшие углы.
На местности базисы фотографирования разбивают ориентированными по участкам так же, как и выбранное направление плоскости проекции.
4. Вертикальные проекции рельефа на существующих приборах создаются:
а) графоаналитически;
б) при приборах воздушной стереофотограмметрии (стереопланиграф и др.).
Графоаналитический способ включает следующие этапы:
а) на стереокомпараторе наблюдают все характерные точки обрыва и вычисляют их фотограмметрические координаты (приложение 22);
б) проекции составляют на основе в виде сетки квадратов (10×10 или 5×5 см). С помощью палетки-координатометра или осевого координатографа по координатам Xφ, Hφ (Zφ) характерные точки показывают на проекции и выписывают отстояния Yφ;
в) по характерным направлениям показывают линии интерполяции, на которых определяют положение промежуточных фронталей;
г) точки, имеющие одинаковые отстояния, соединяют линиями одноименных фронталей.
При создании единой вертикальной проекции для участка, снятого с нескольких базисов, все координаты точек вычисляют в системе координат крайнего левого базиса фотографирования.
На стереокомпараторе можно сразу снять точки фронталей.
Вертикальные проекции по материалам фототеодолитной съемки наиболее эффективно строятся на стереоприборах воздушной стереофотограмметрии, так как схема построения фронталей аналогична схеме построения по аэроснимкам горизонталей. С точки зрения фотограмметрии обе изолинии являются линиями равных параллаксов.
Снимки на стереоприборах ориентируются по контрольным точкам. На стереопланиграфе нормально ориентированную модель создают обычными приемами, на оси стереопланиграфа включают как при обработке аэроснимков.
Сводку проекций, полученных на стереопланиграфе, подготавливают в процессе вычерчивания фронталей. Для первого левого базиса расчетное отстояние
Yp = Yφ - 0,5f.
Если данный базис отстоит от левого крайнего базиса на величину ΔY, то
Yp = Yφ - 0,5f ± ΔY.
Построенные проекции монтируют с учетом координат центральных точек отдельных проекций.
Маршрутные базисы можно обрабатывать сразу на приборе сплошным массивом, перемещением основы на столе координатографа в соответствии с координатами Xφ и Zφ (Hφ) центров отдельных проекций.
5. При проектировании трассы по вертикальной проекции рельефа решают следующие задачи:
Определение координат и высот точек. Отметки точек местности определяют измерением в масштабе расстояний от горизонтальных линий координатной сетки до искомых точек. Если вертикальное расстояние (nd), измеренное по проекции от точки n до горизонтальной линии с отметкой 250, равно 12,7 мм = 0,0127 м, от отметки
Hn = 259,00 - 0,0127·200 = 247,46 м.
Абсциссы соответственно определяют по расстояниям до точек от вертикальных линий координатной сетки. Для той же точки n измерено горизонтальное расстояние СП = 6 мм; тогда
Xn = +40,00 + 0,006·200 = 41,20 м.
Составление продольных разрезов и проектирование трассы в плане. Укладка трассы по вертикальной проекции рельефа начинается с создания продольных разрезов. Если по данным предварительного проекта известны углы отклонения δ отдельных участков трассы от направления базиса фотографирования (плоскости проекции) уклон следа секущей плоскости
iраз = iтрsecδ.
Положение первой точки продольного разреза определяется как в п. 28.
Когда положение следа секущей плоскости продольного разреза на проекции определено (I-I на рис. 3, а и MN на рис. 4), строят разрезы. На горизонтальной прямой откладывают расстояния между точками пересечения секущей плоскости с фронталями и другими характерными точками (оси логов, хребты и т.д.), у точек выписывают их отстояния. На перпендикулярах, восстановленных из точек на прямой, откладывают в заданном масштабе MY отстояния. Полученные точки соединяют прямыми линиями. Построение продольного разреза можно ускорить, расположив его в проекционной связи с вертикальной проекцией, т.е. так, чтобы обе проекции на одной вертикали имели одинаковые абсциссы.
Рис. 3
На созданных продольных разрезах - горизонтальном на рис. 3 и наклонном на рис. 4 - укладывают трассу и выполняют подготовительные работы для съемки поперечников.
Рис. 4
По проекту плана линии и уклонам, принятым при трассировании, может быть построена вертикальная проекция трассы. При этом вычисляются для прямых участков трассы отметки точек начала (НК) и конца (КК) кривых, на кривых дополнительно отметках середины кривой (СК) (см. рис. 4). По вычисленным отметкам точки трассы строят на вертикальной проекции рельефа и соединяют прямыми линиями.
Составление поперечных профилей. Возможны три варианта расположения плоскости поперечного профиля относительно вертикальной плоскости проекции: плоскость поперечника перпендикулярна плоскости проекции, параллельна плоскости проекции, имеет произвольную ориентировку.
В каждом случае методика съемки профиля имеет свои особенности.
Если плоскость поперечника перпендикулярна вертикальной плоскости проекции, след секущей плоскости на проекции - вертикальная прямая линия (AB на рис. 4, а). При построении такого профиля на отдельном листе миллиметровой бумаги прочерчивают вертикальную линию и откладывают на ней расстояния между фронталями и характерными точками. У точек выписывают их отстояния, отложив которые получают точки поперечного профиля (рис. 5).
Рис. 5
При плоскости поперечника, параллельной плоскости проекции, известно отстояние Yn, постоянное для всех точек: если оно кратно интервалу сечения фронталей ΔY, то очертание поперечника дает фронталь, имеющую то же отстояние. Для любых других значений Yn точки, поперечника определяют по интерполяции.
В общем случае трасса отклонена от вертикальной плоскости проекции на угол δ.
Плоскость поперечника проекции составит при этом с плоскостью вертикальной проекции угол β, равный
β = 90° - δ.
Горизонтальные следы секущих плоскостей MN и PQ представлены на рис. 3, б.
Точки профиля на вертикальной проекции будут находиться на пересечении одноименных фронталей секущей плоскости и вертикальной плоскости проекции.
Заложение фронталей секущей плоскости в масштабе вертикальной проекции 1:m равно
![]() .
.
Расстояние l между точками искомого профиля с отстояниями, кратными интервалу сечений рельефа ΔY, определяется по формуле
![]() .
.
Если горизонтальный след поперечника и вертикальная проекция рельефа находятся в проекционной связи, профиль строят в следующем порядке.
На листе бумаги (рис. 6) проводят ряд вертикальных линий. Расстояние между ними l равны вычисленным. Для поперечника пк 16+20 l1 = ab = δb ..., для поперечника пк 16+38 расстояние l2 = a′1b′ = b′c′....
Рис. 6
Вертикальные линии откладывают вниз для точек, отстояния которых меньше отстояния точки пересечения горизонтального следа поперечника с линией продольного разреза.
Ось пути показывают вертикальной линией, отстояние которой соответствует отстоянию оси на плане трассы Yм = 123,7 м; Y2 = 122,3 м.
Из точки пересечения следа поперечника и проекции фронтали (например, точки Л′, имеющей отстояние Yл = 127 м) восстанавливают перпендикуляр до пересечения в точке Л″ с одноименной фронталью на вертикальной проекции рельефа. Затем циркулем-измерителем берут расстояние от горизонтальной линии I-I до полученной точки Л″ и откладывают на миллиметровой бумаге от линии I-I на вертикали, имеющей то же отстояние Yл = 127 м.
Таким образом строят остальные точки поперечника.
Составление продольного профиля по оси трассы. Продольные профили по оси пути строят так же, как поперечные (см. рис. 4).
Если трасса - прямая линия, параллельная плоскости проекции, продольный профиль представляет собой линию на проекции, отстояния точек которой равны отстоянию трассы (а″ ... д″) на участке между точками М-Н, полученному по интерполяции.
На вертикальной проекции определяют точки, имеющие отстояния, кратные интервалу сечения (точки З″, К″, М″ и Н″). Если построенные точки не отражают всех переломов профиля, из характерных мест изгибов фронталей, расположенных между уже полученными точками, опускают перпендикуляры к трассе и определяют отстояния точек трассы, соответствующие изгибам фронталей. Затем проведенный перпендикуляр сверху ограничивается точкой, интерполированное отстояние которой равно отстоянию точки трассы. Например, по перпендикуляру, опущенному из лога (равной точки И″) определено, что точка трассы на этом изгибе имеет отстояние 120,6 м. Значит, окончательную точку И″ надо разместить на перпендикуляре, интерполируя между фронталями 120 и 121 м.
Подобным образом получены точки профиля Ж″ и Л″.
Продольный профиль (рис. 7) строится следующим образом. На прямой откладывают расстояния с плана трассы а′б′, б′в′ ... М′Н′, а в соответствующих точках превышения над проектной линией - взятые с вертикальной проекции рельефа.
Рис. 7
Помимо задач, сопровождающих трассирование дорог, применение вертикальных проекций рельефа рекомендуется:
- для подсчета объемов работ по поперечным профилям, отстояниям характерных точек проекции, а также для обозначения границы земляных работ по красным проектам отстояниям;
- при проектировании противообвальных сооружений и обрушения нависающих частей обрывов, подсчете проектных и фактических объемов при взрывах на сброс или обрушение;
- для инженерно-геологической характеристики обнажений, выходов пород, сбросов и других геологических явлений в районе трассы.
Приложение 17
СТРУБЦИНА ДЛЯ КРЕПЛЕНИЯ ФОТОТЕОДОЛИТА К ОПОРЕ
Сконструированная и изготовленная ЦНИИСом струбцина (см. рисунок) предназначена для пространственного ориентирования и крепления фототеодолита к любым предметам, используемым в качестве опоры для фотографирования.
Струбцина снабжена червячными шестернями с микрометренными винтами, позволяющими вращать и наклонять фотокамеру в любых направлениях.
Дополнительное ориентирующее устройство струбцины позволяет при производстве фотосъемки с точностью до 1° устанавливать заданные величины угловых элементов внешнего ориентирования в пределах α = ±30°, ω = ±30°, x = ±90°. Дополнительное устройство состоит из подвижного уровня со шкалой углов в градусах, фиксирующего посредством переключающего устройства угловые элементы внешнего ориентирования.
Струбцина снабжена также переходной втулкой, позволяющей использовать механизмы наклонов и поворотов при съемке со стандартных геодезических штативов.
Опытно-производственные работы показали, что струбцина надежно крепится к любым деталям сооружений, используемых в качестве опоры, и позволяет уменьшить взаимные углы наклонов и поворота снимков стереопары до 1-2°, благодаря чему качество стереоскопических наблюдений снимков значительно повышается.
Конструктивно струбцина проста и не требует специальных юстировок.
ЛИТЕРАТУРА
1. Блохин Н.А. Стереофотограмметрическая наземная съемка. М., ОПТИ, 1937.
2. Коншин М.Д. Аэрофотограмметрия. М., «Недра», 1967.
3. Кирилленко В.С., Бруевич П.Н. Составление фронтальных планов и профилей по материалам фототеодолитной съемки. М., «Недра», 1976.
4. Лобанов А.Н. Фототопография. М., «Недра», 1968.
5. Панкратьев Ю.Н., Пузанов Б.С., Сердюков В.М. Инженерная фотограмметрия. Львовский университет, 1964.
6. Скиридов А.С. Стереофотограмметрия. М., Геодезиздат, 1959.
7. Трунин А.П., Финаревский Н.Н., Чистяков С.В. Фототеодолитная съемка в крупных масштабах. М., «Недра», 1970.
СОДЕРЖАНИЕ
|
|